Elektroniklere Genel Bakış

Komponentler için Tıklayınız









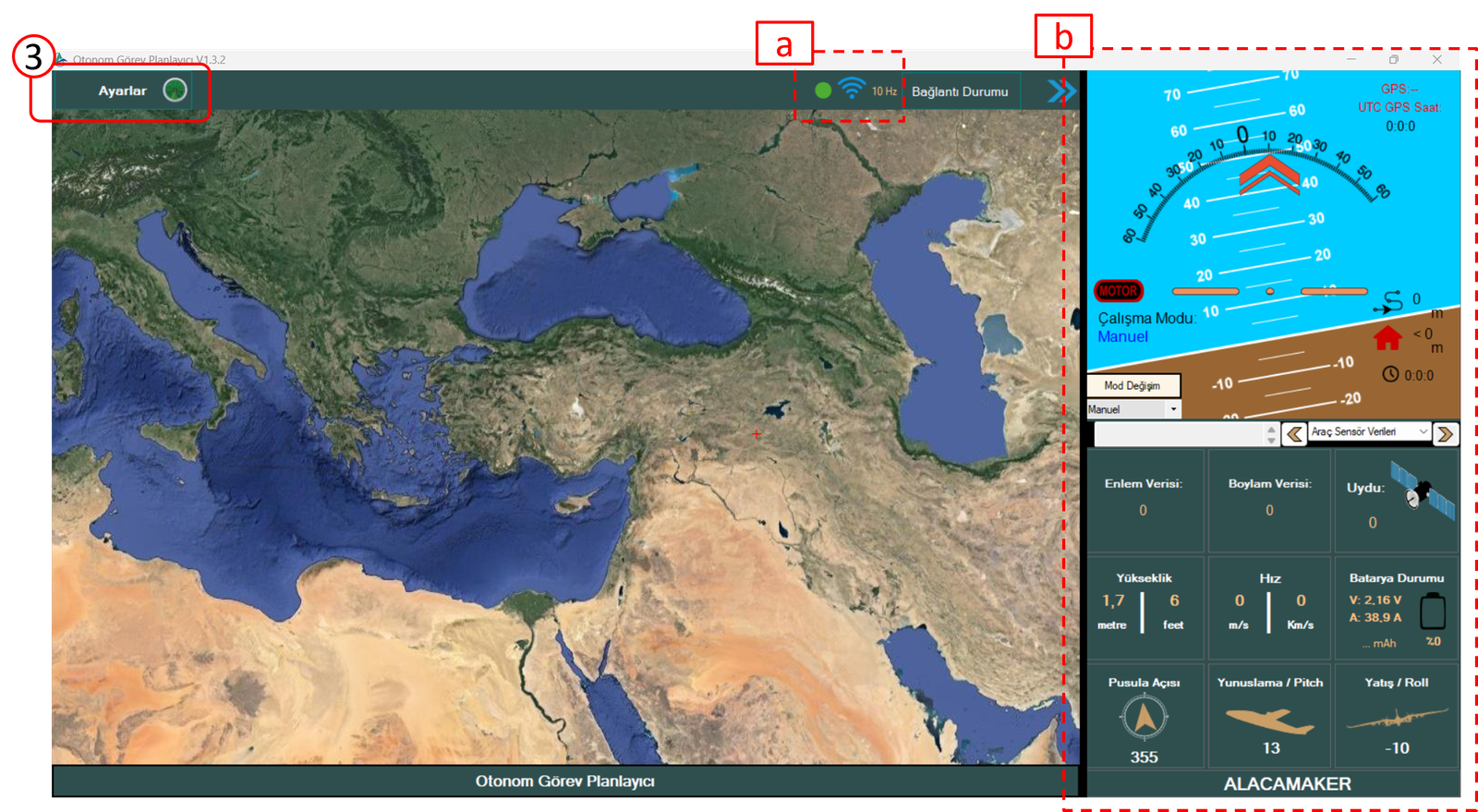
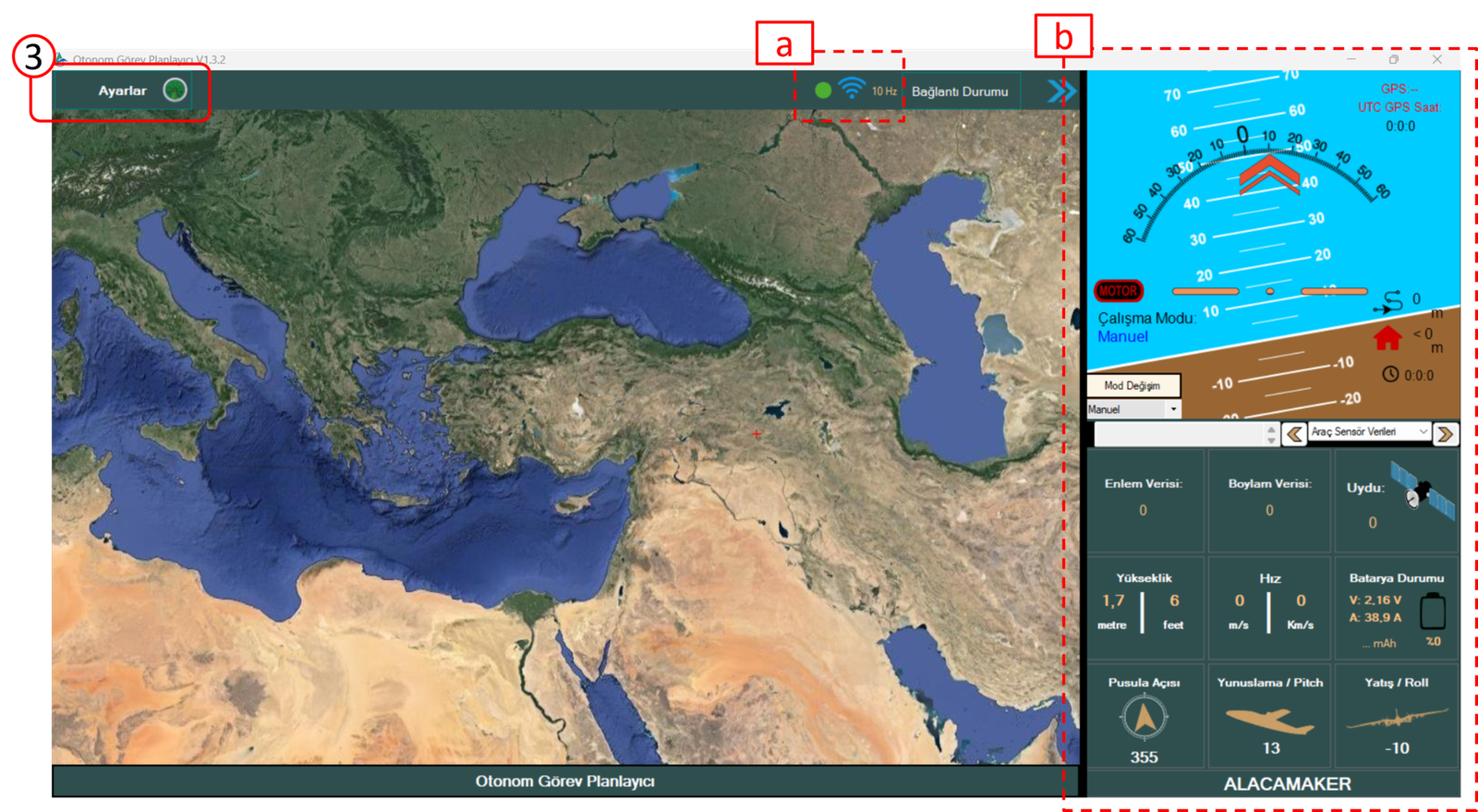
Bağlantı Durumu

Ayarlar
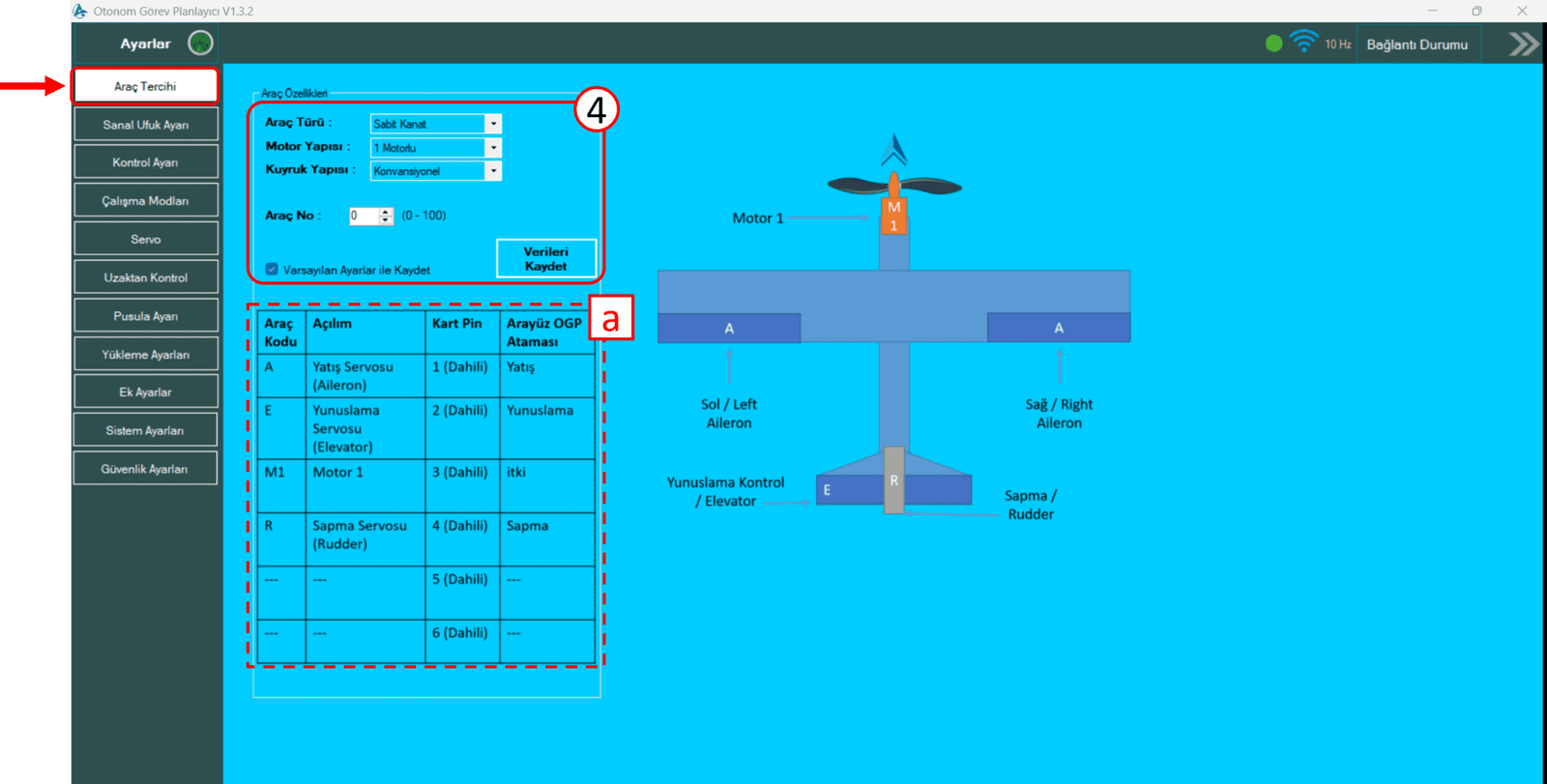
Araç Tercihi
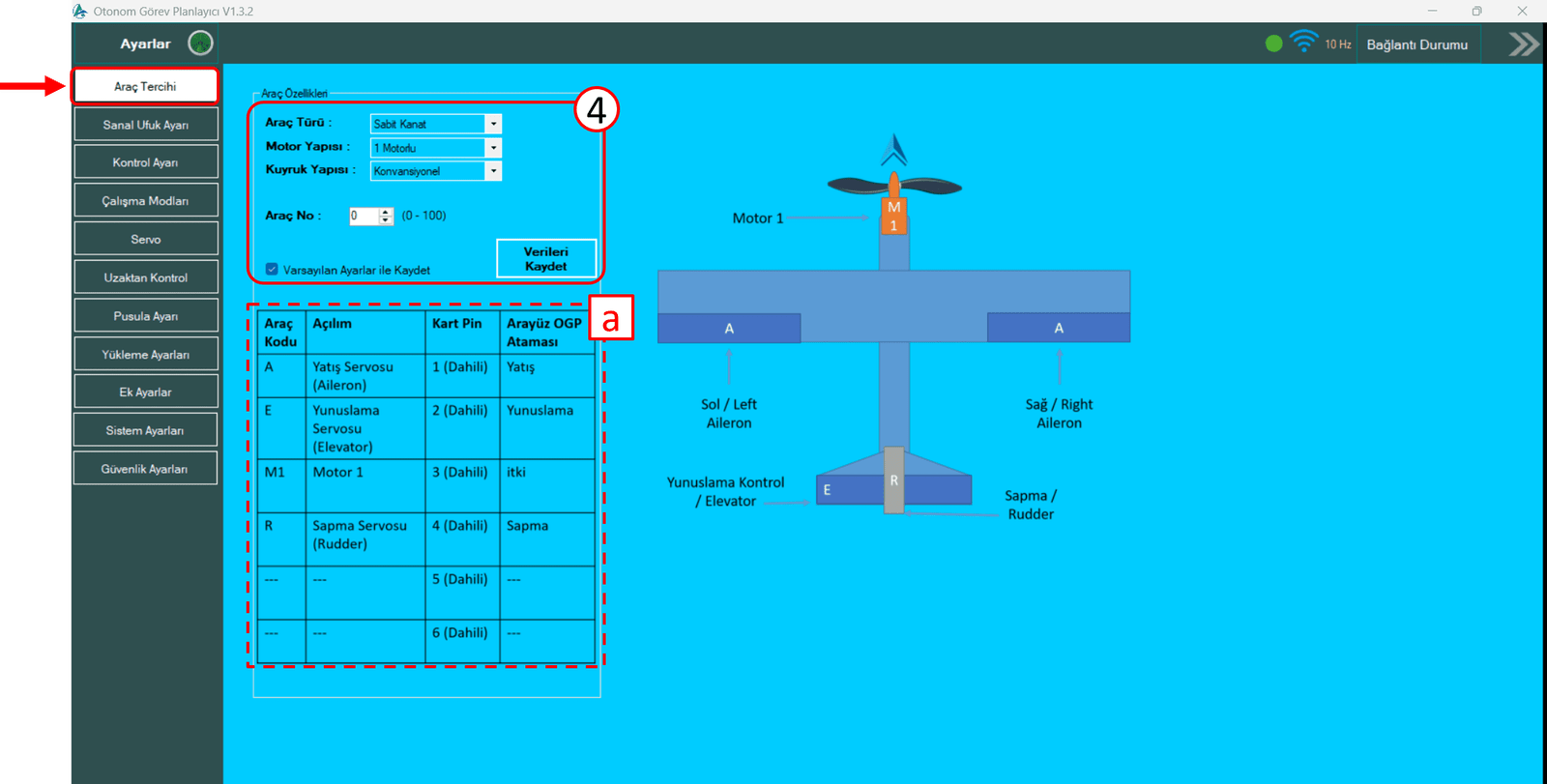
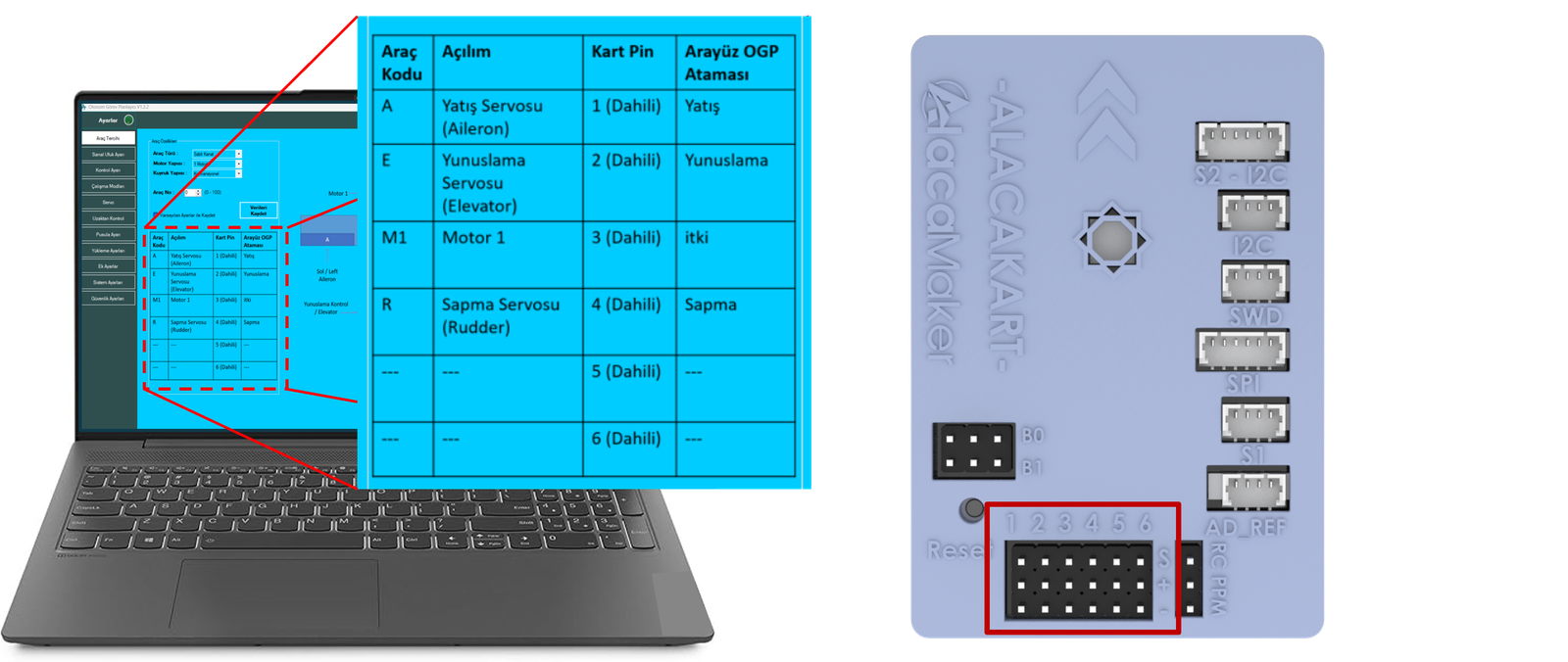
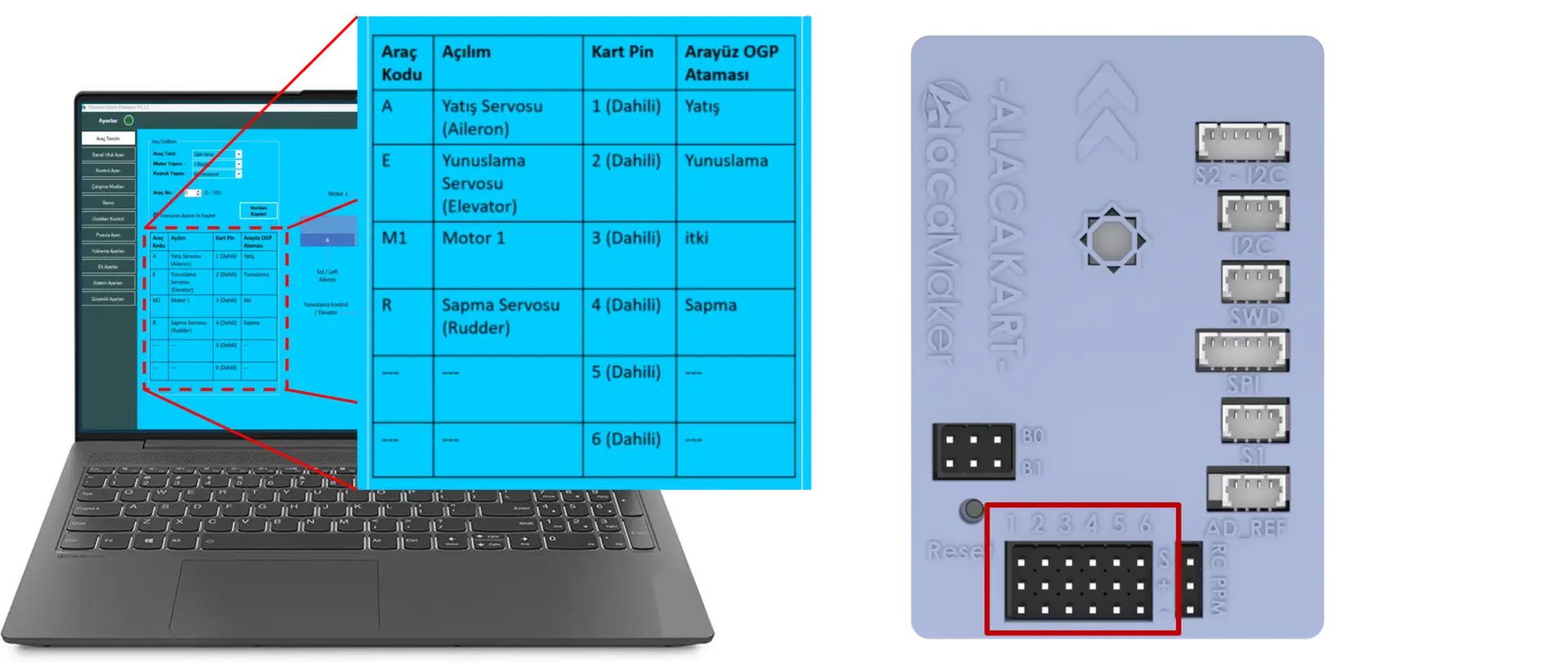
Pin Bağlantıları
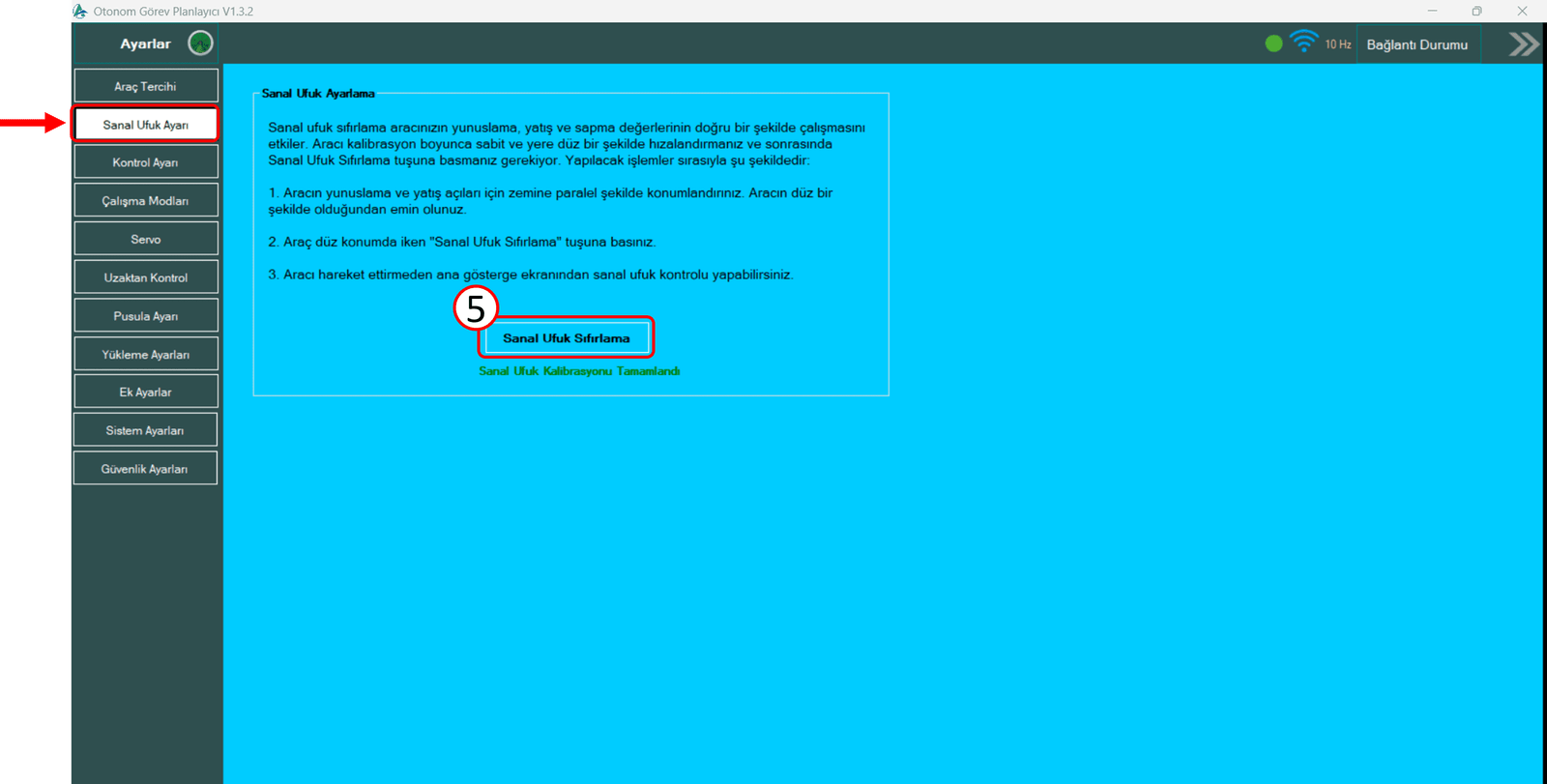
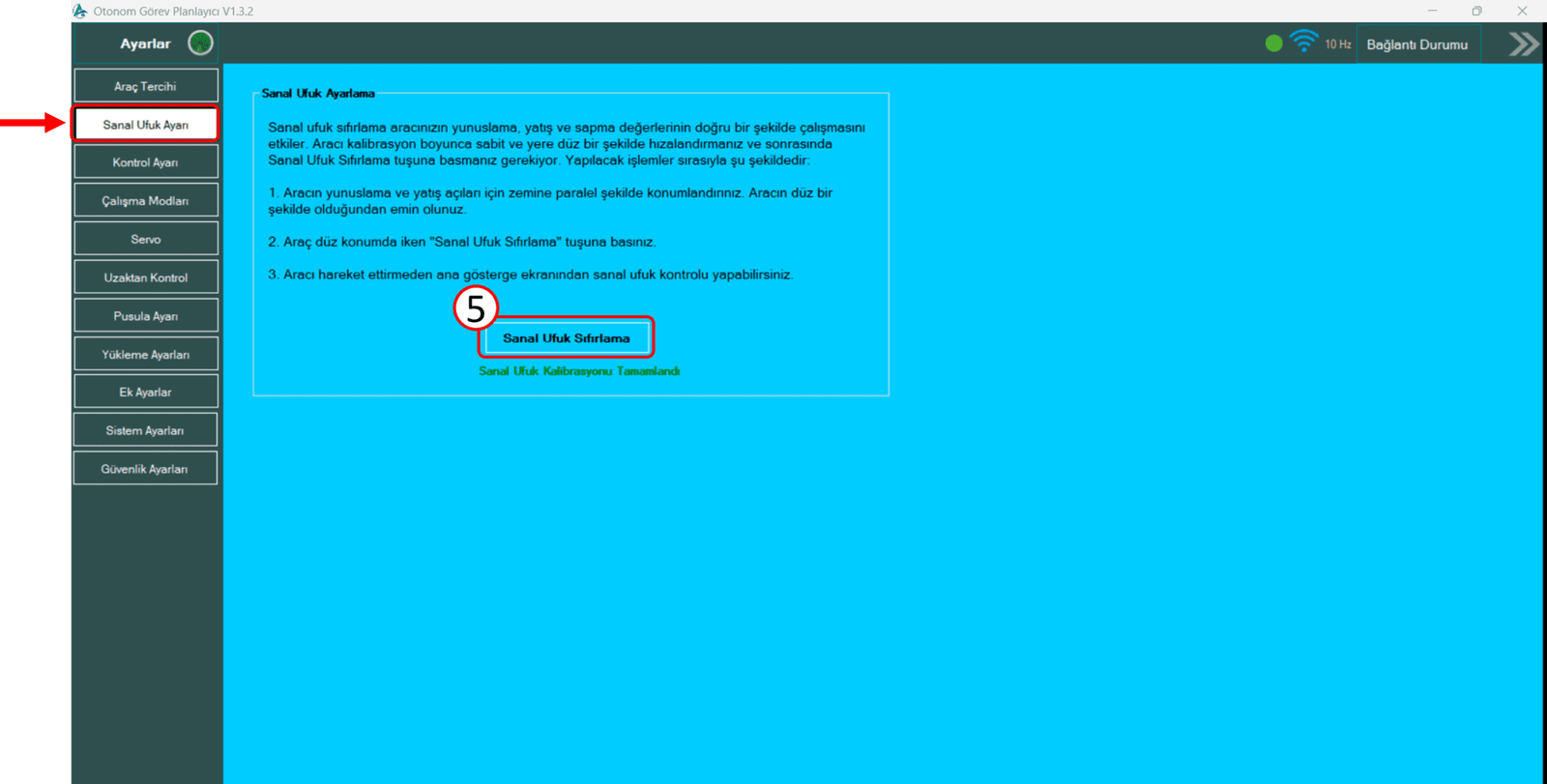
Sanal Ufuk Ayarları
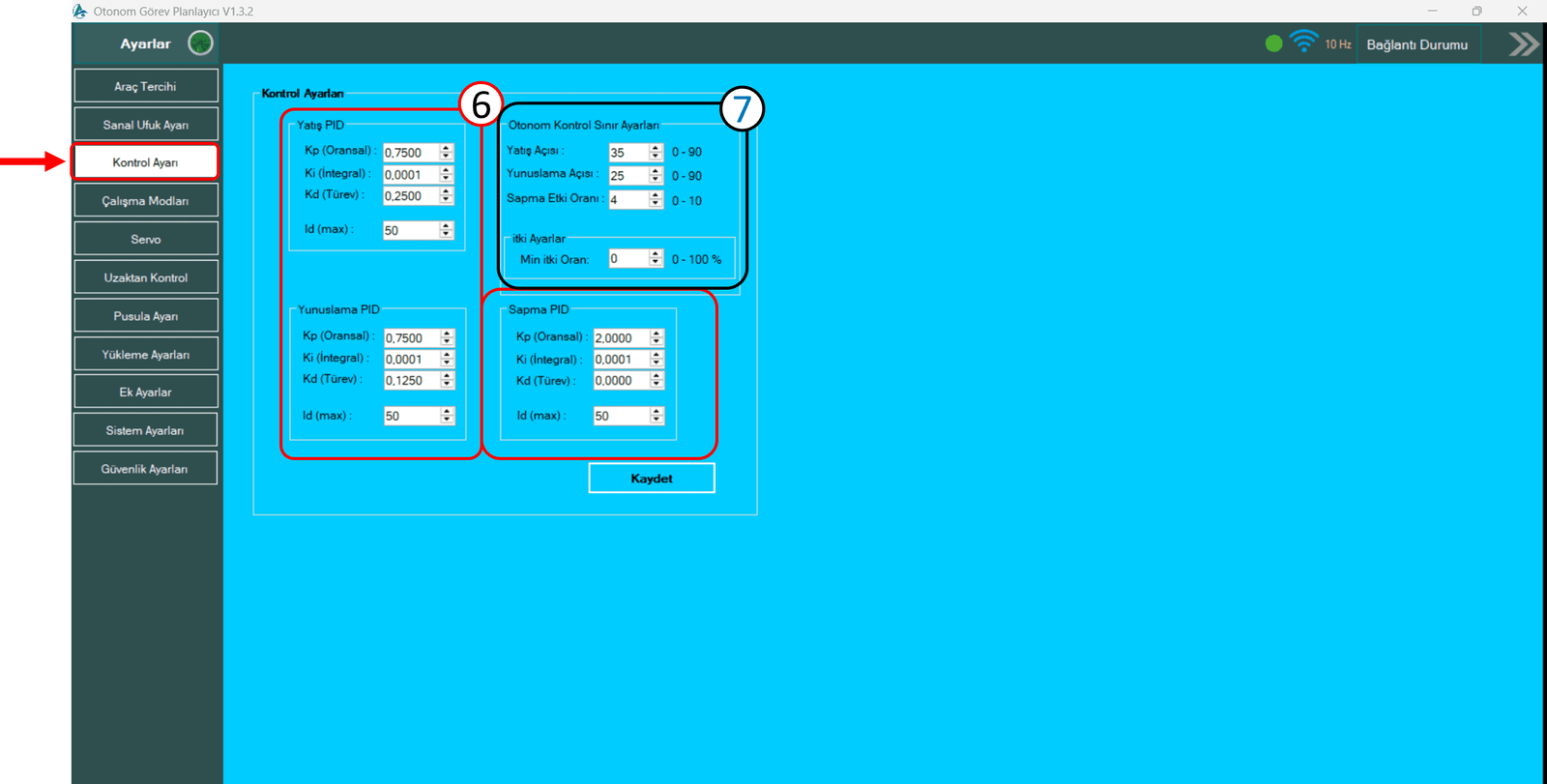
Kontrol Ayarları
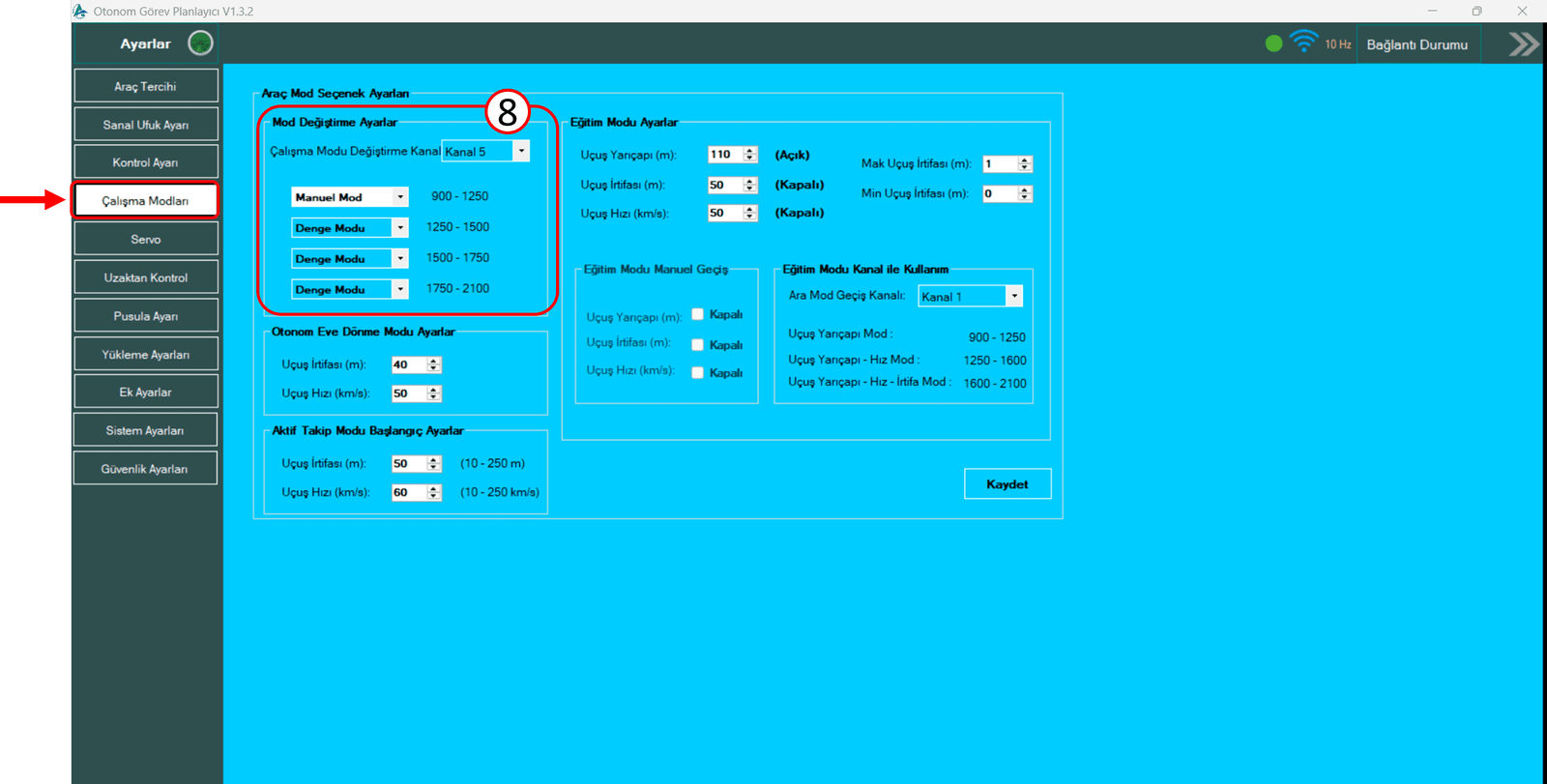
Çalışma Modları
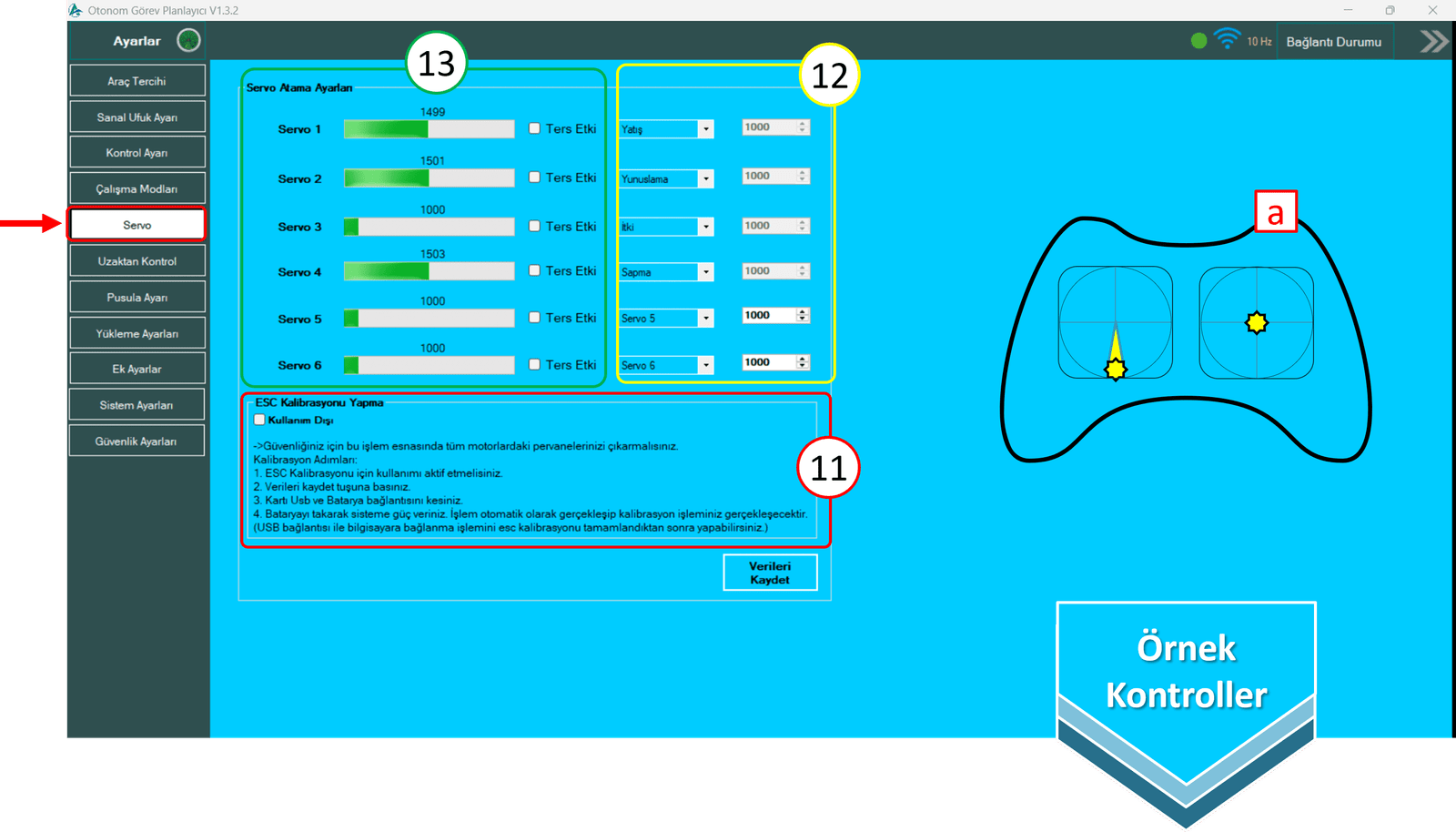
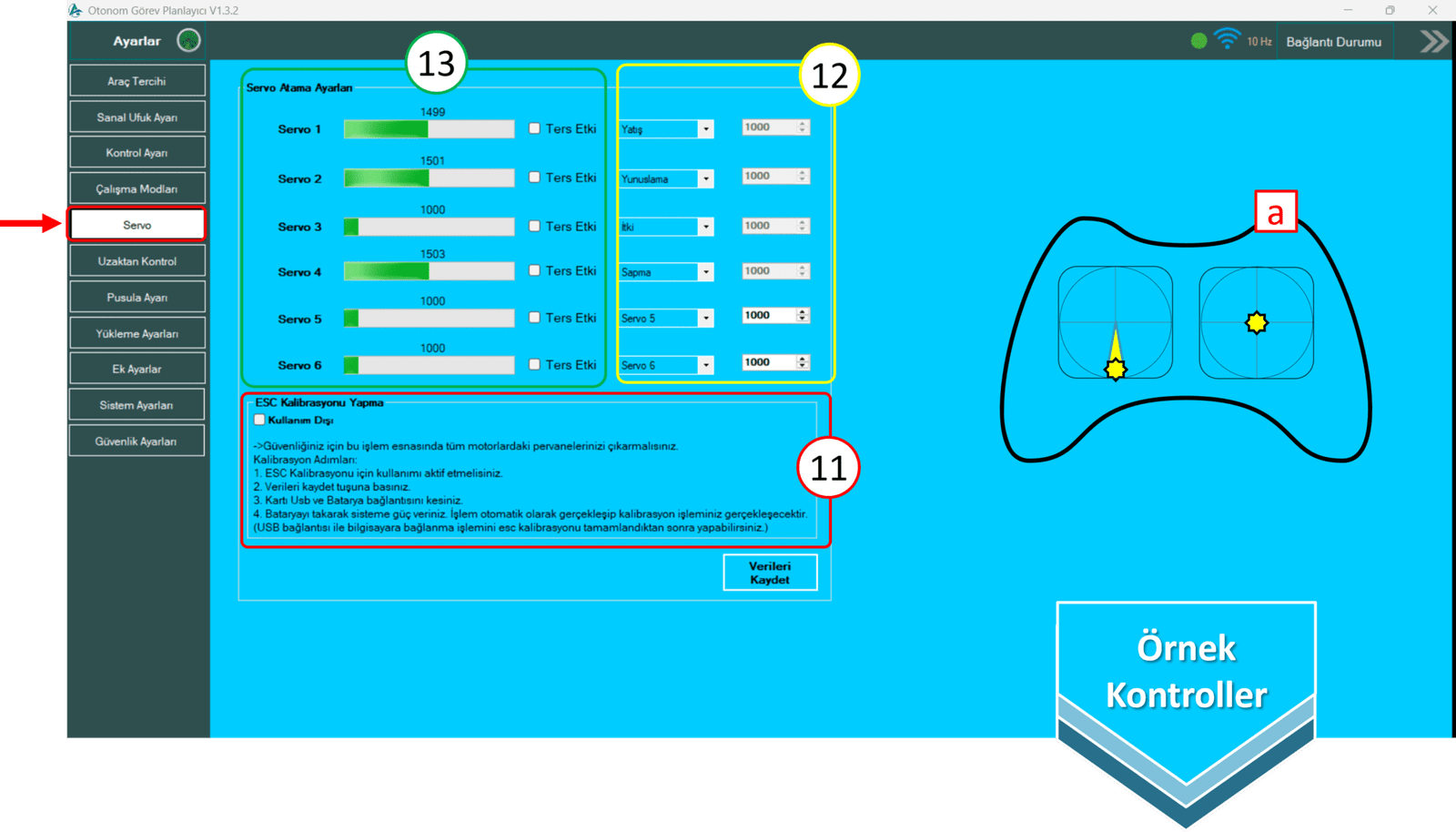
Servo Ayarları
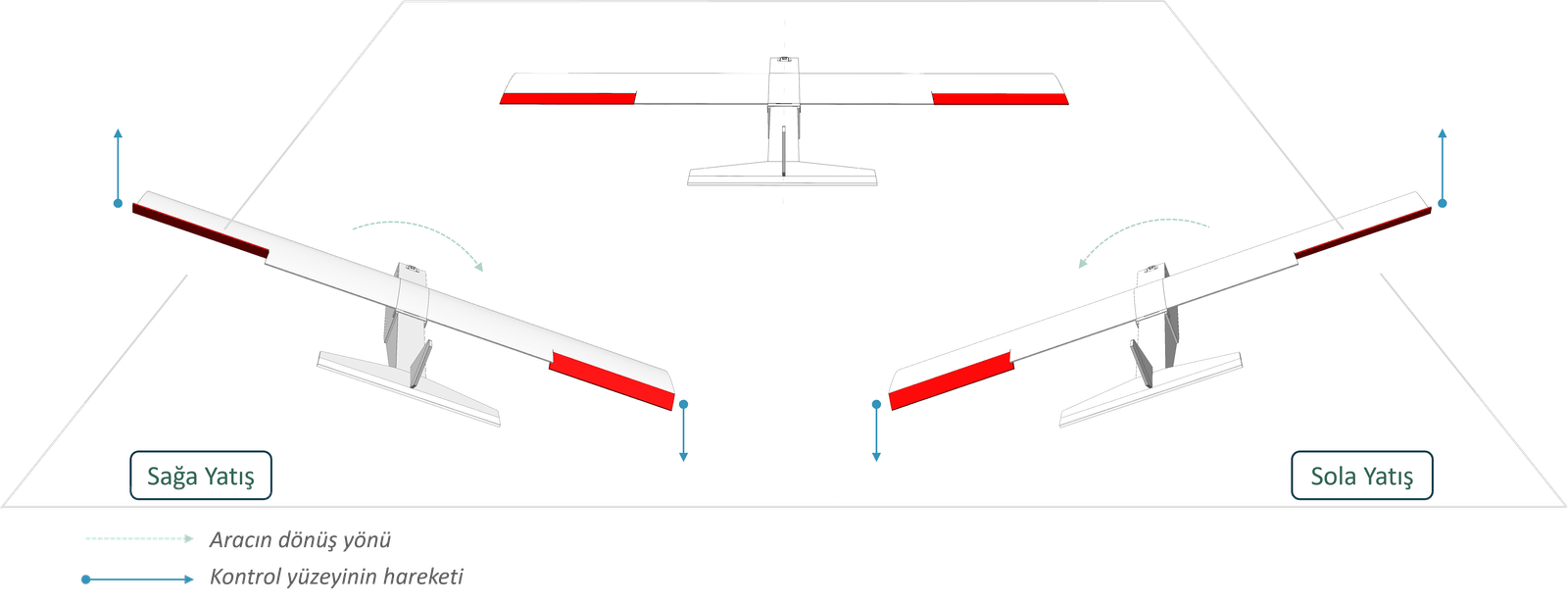
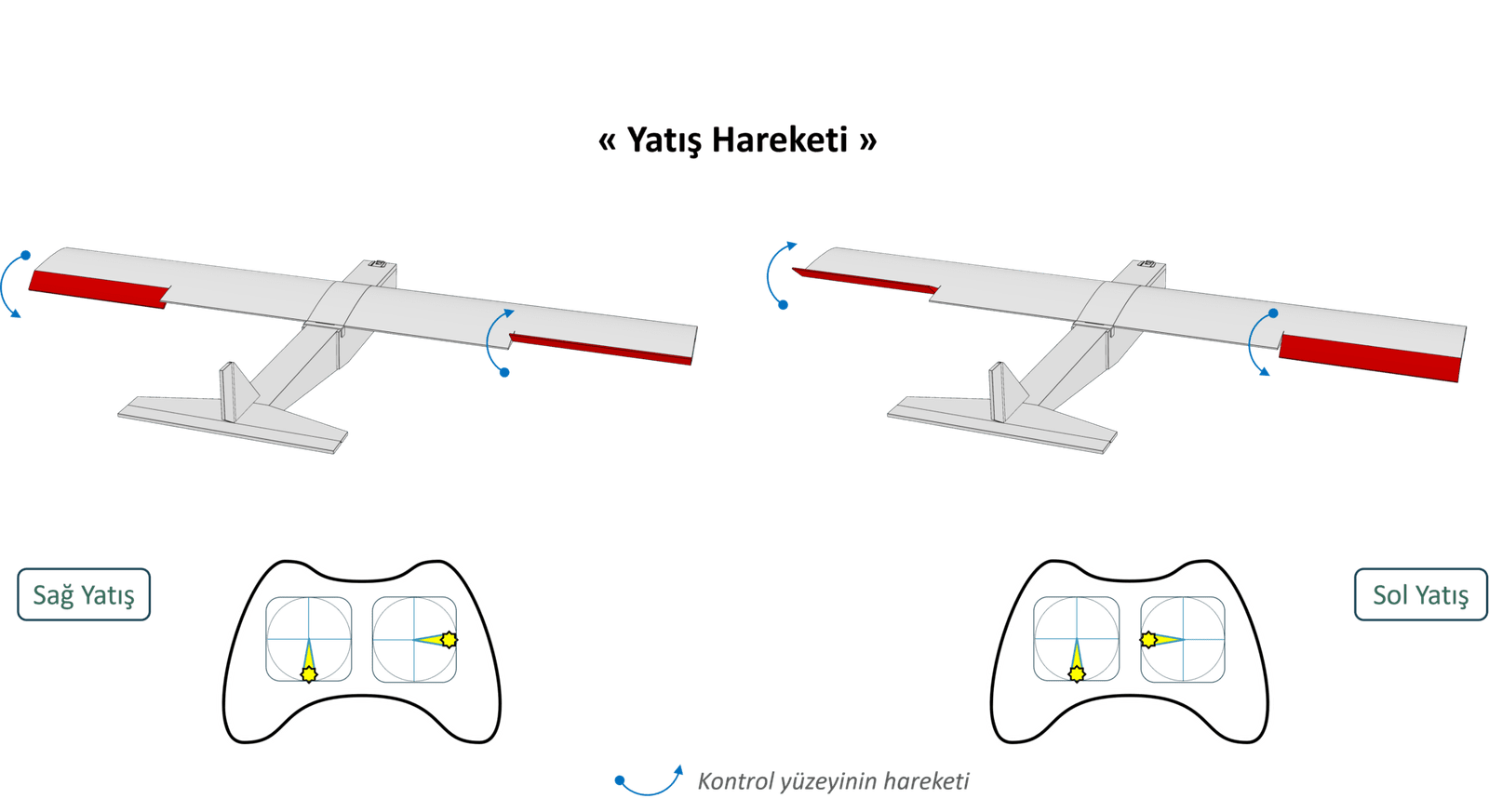
Denge Modu Kontrolleri - YATIŞ
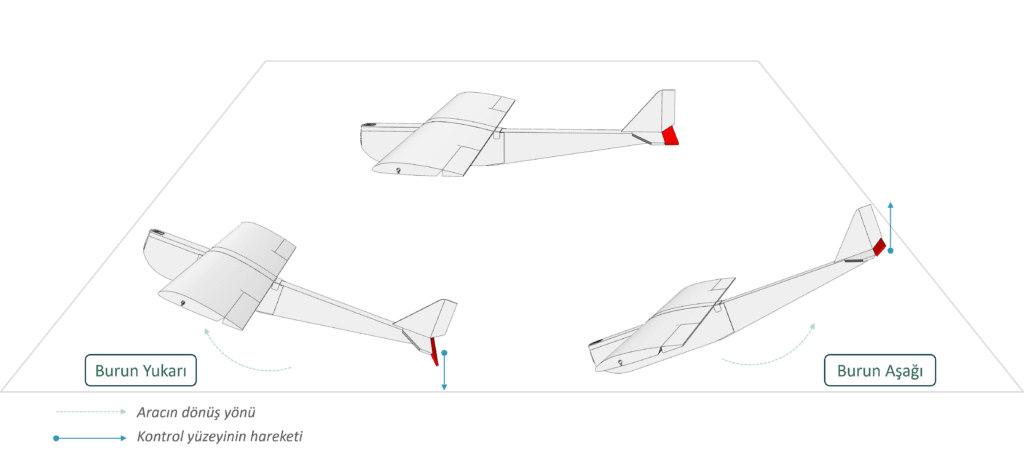
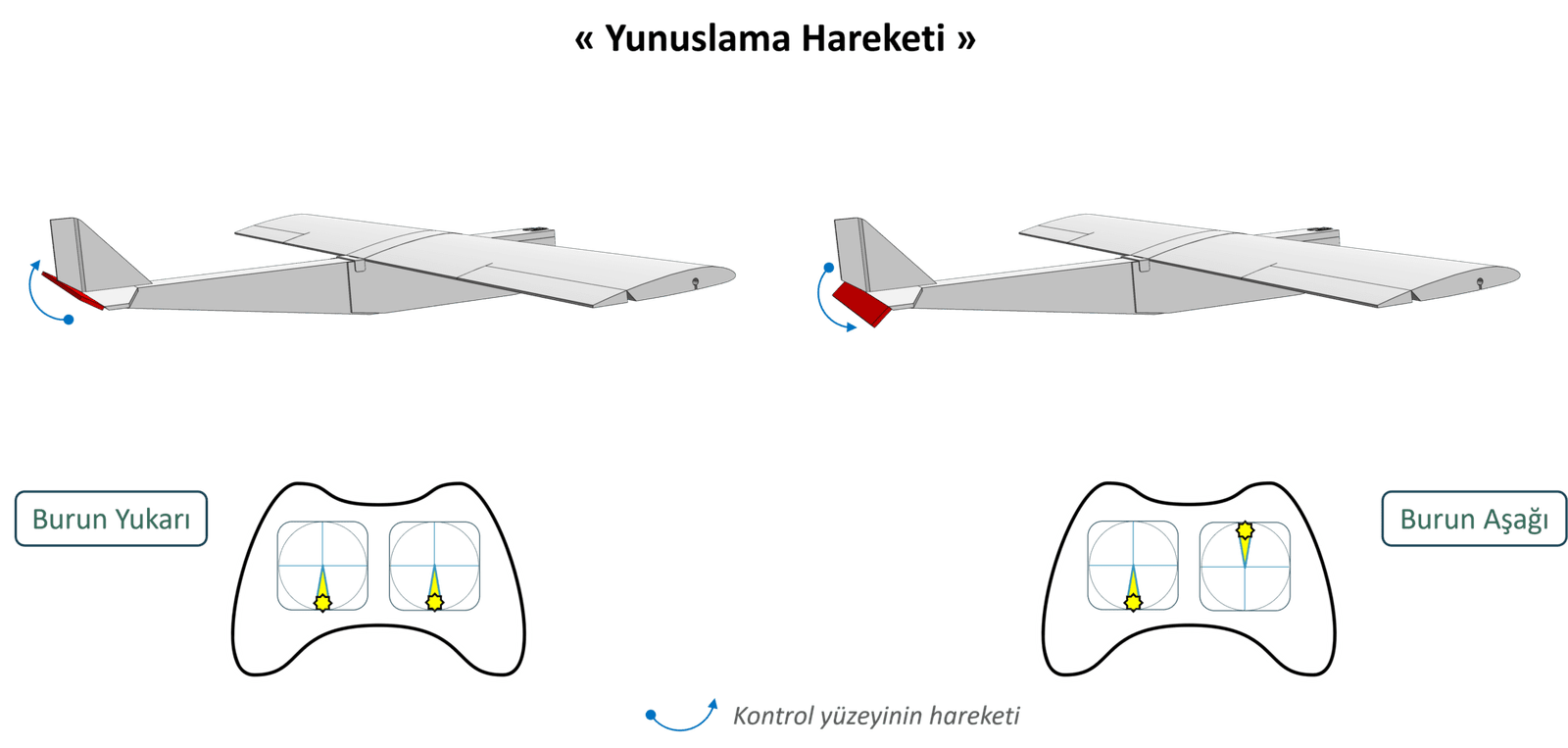
Denge Modu Kontrolleri - YUNUSLAMA
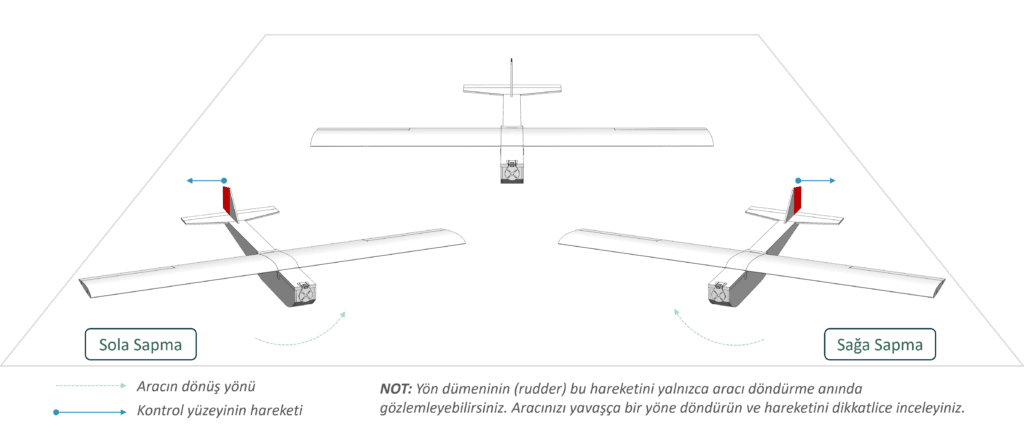
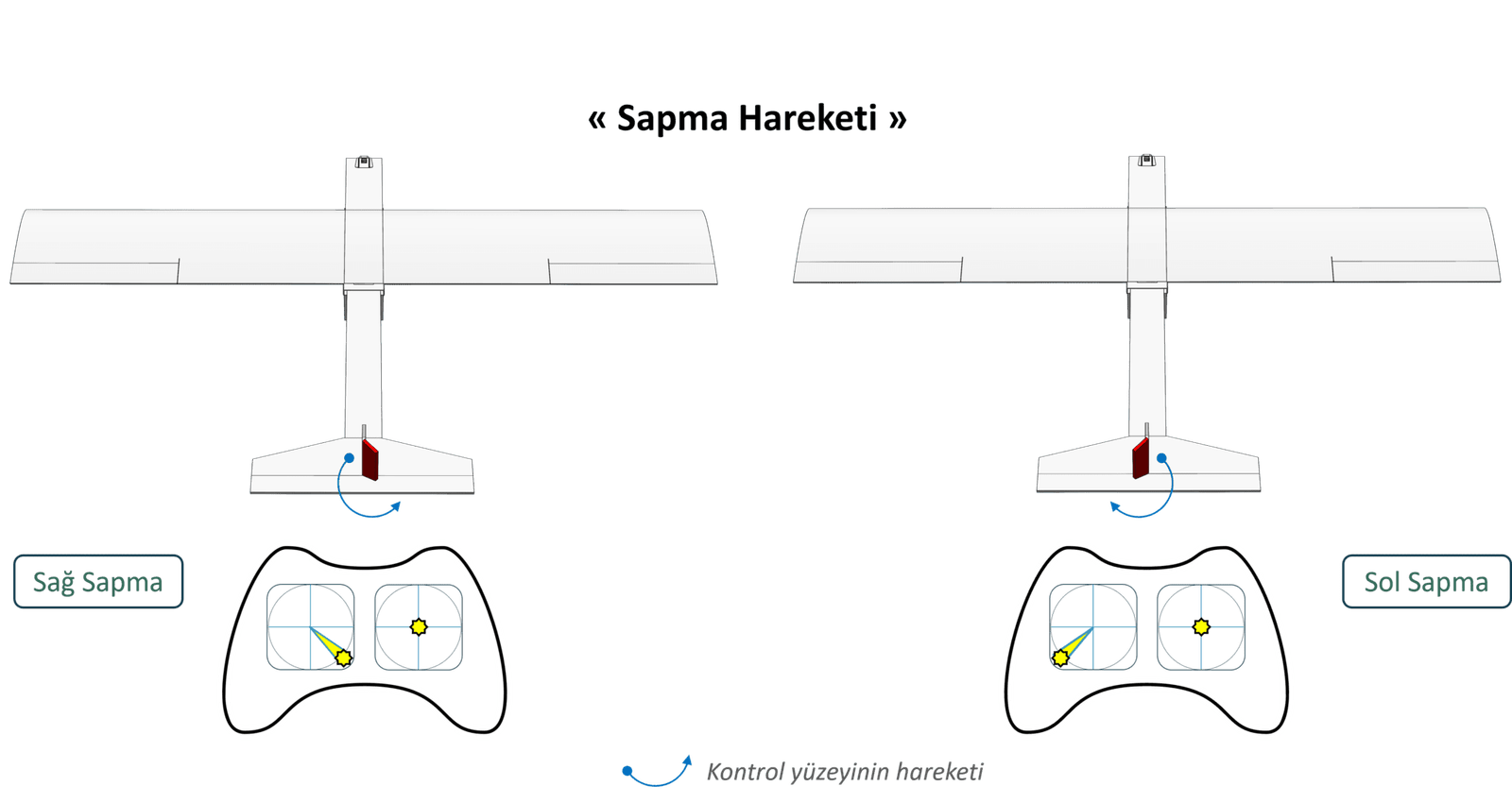
Denge Modu Kontrolleri - SAPMA
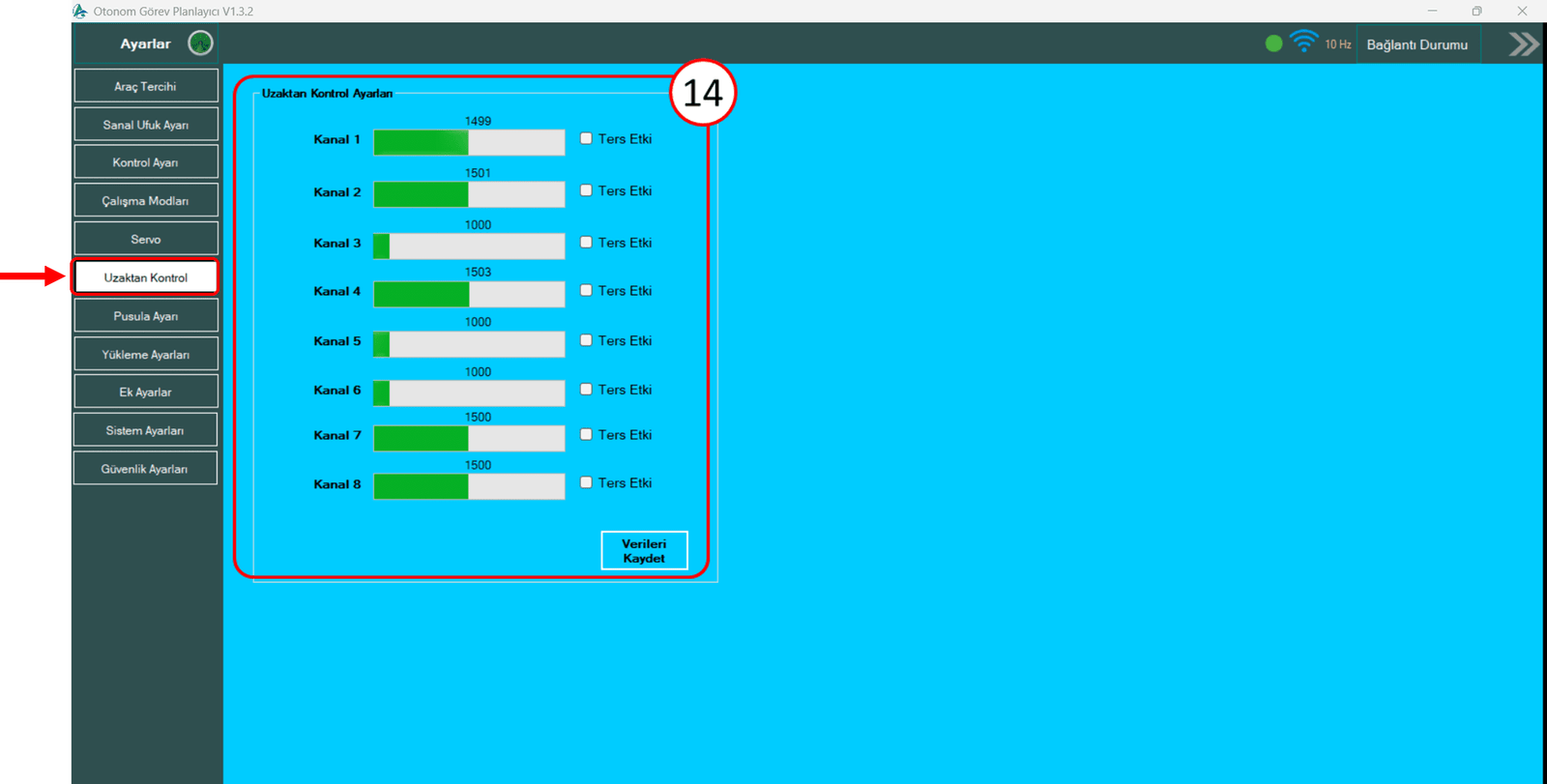
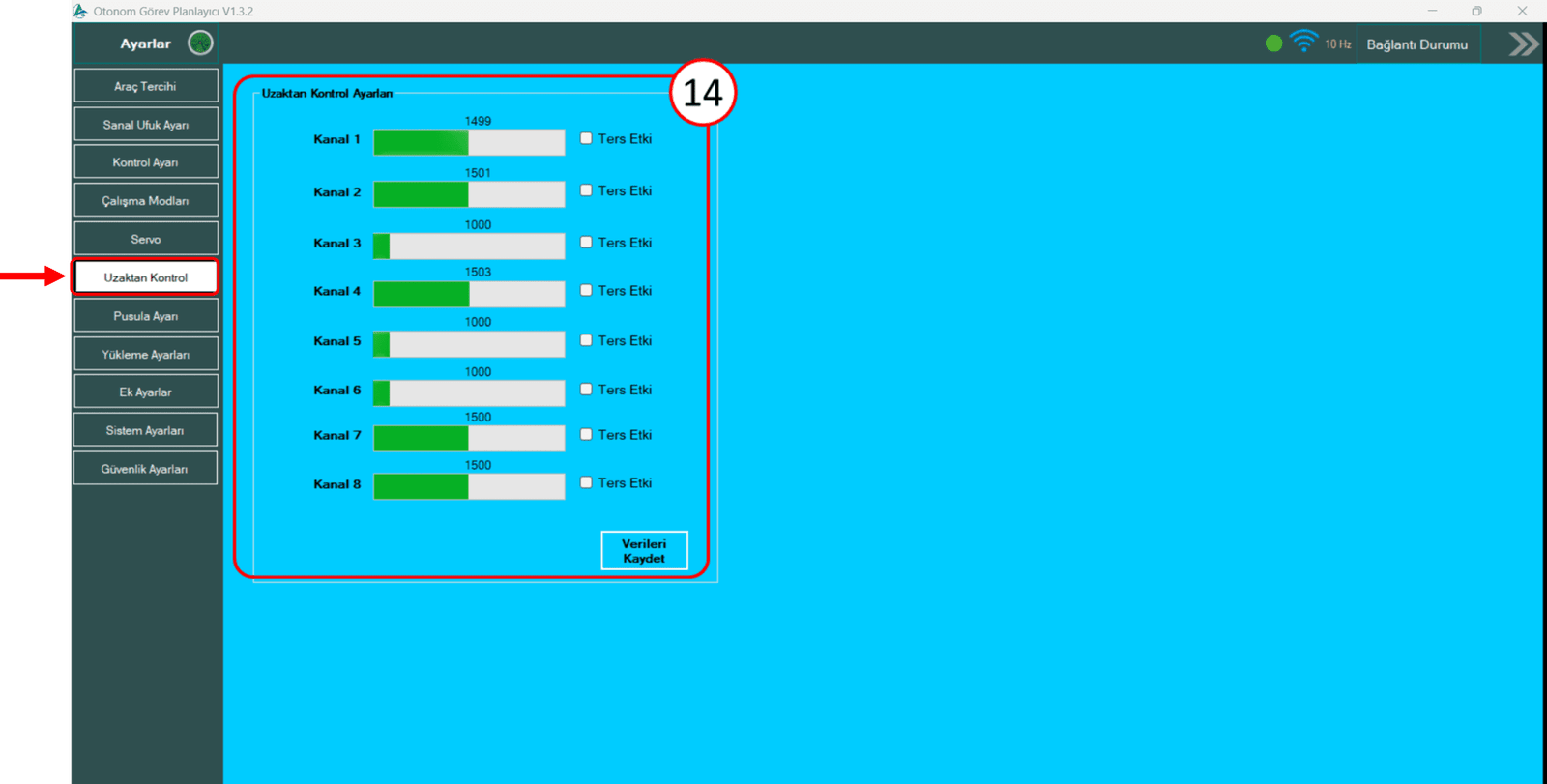
Uzaktan Kontrol
Bağlantı Durumu

Ayarlar
Araç Tercihi
Pin Bağlantıları
Sanal Ufuk Ayarları
Kontrol Ayarları

Çalışma Modları

Servo Ayarları
Denge Modu Kontrolleri - YATIŞ
Denge Modu Kontrolleri - YUNUSLAMA

Denge Modu Kontrolleri - SAPMA

Uzaktan Kontrol
Manuel Kontroller - YATIŞ
Manuel Kontroller - YUNUSLAMA
Manuel Kontroller - SAPMA
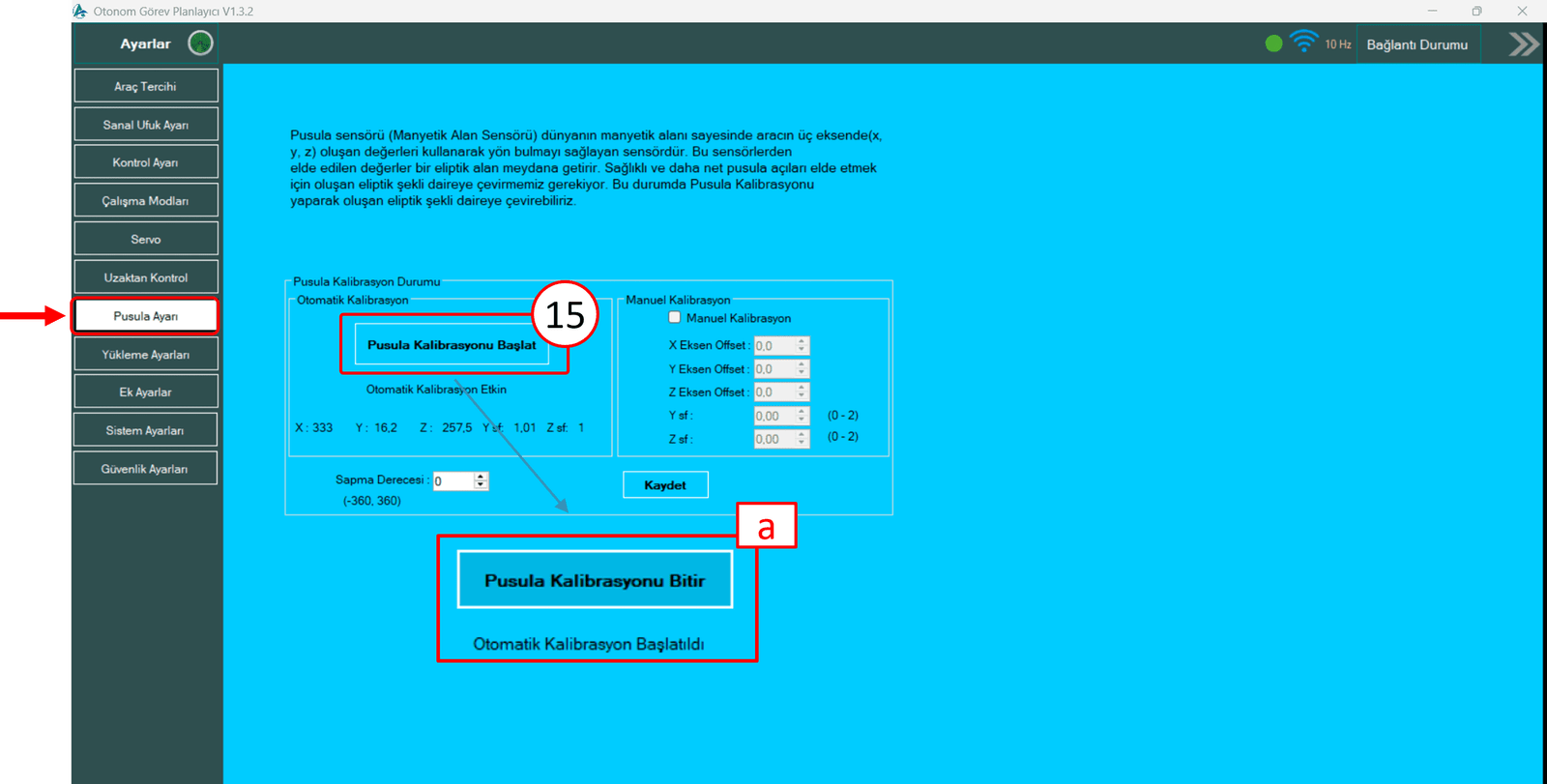
Pusula Ayarı
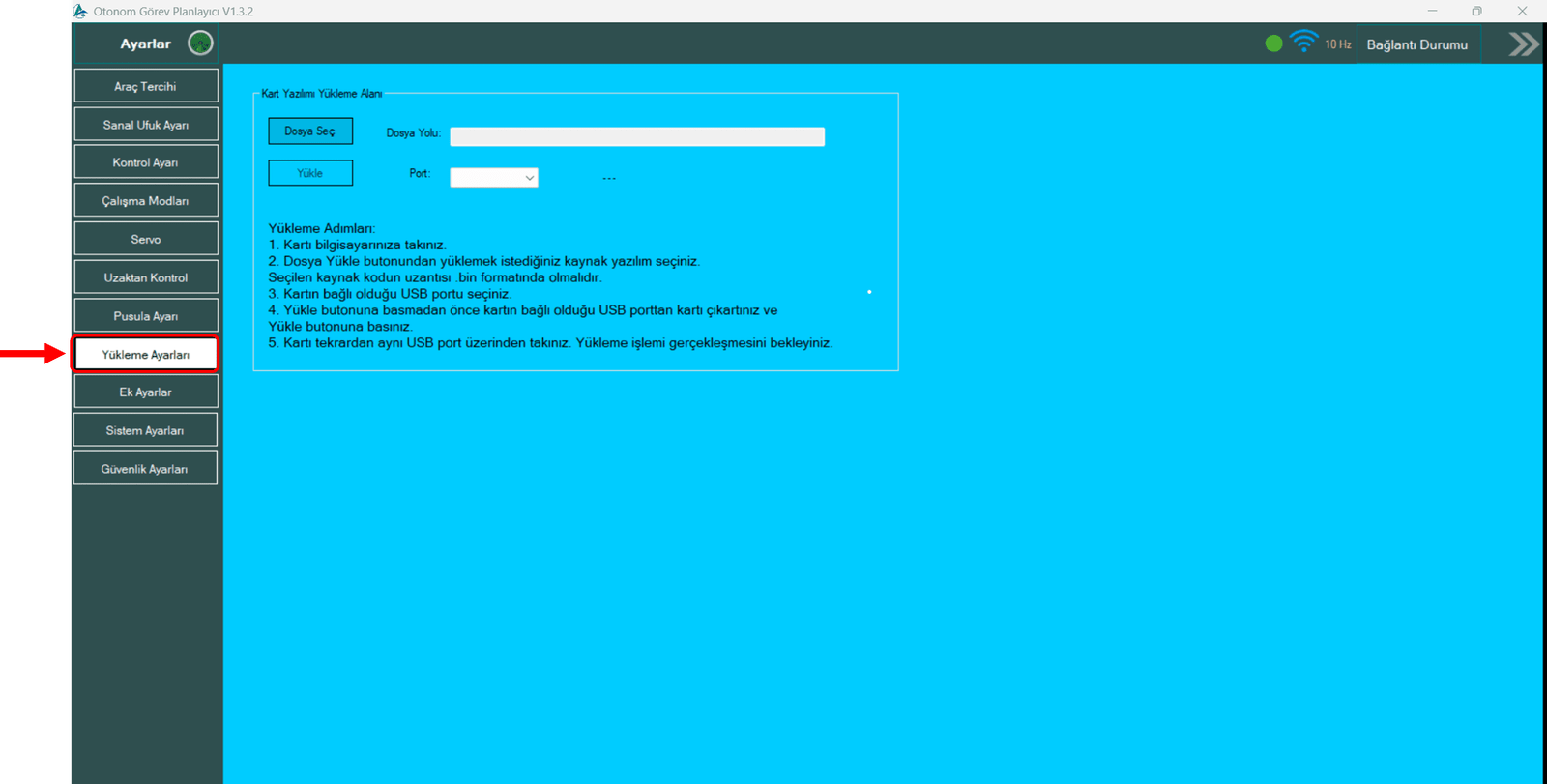
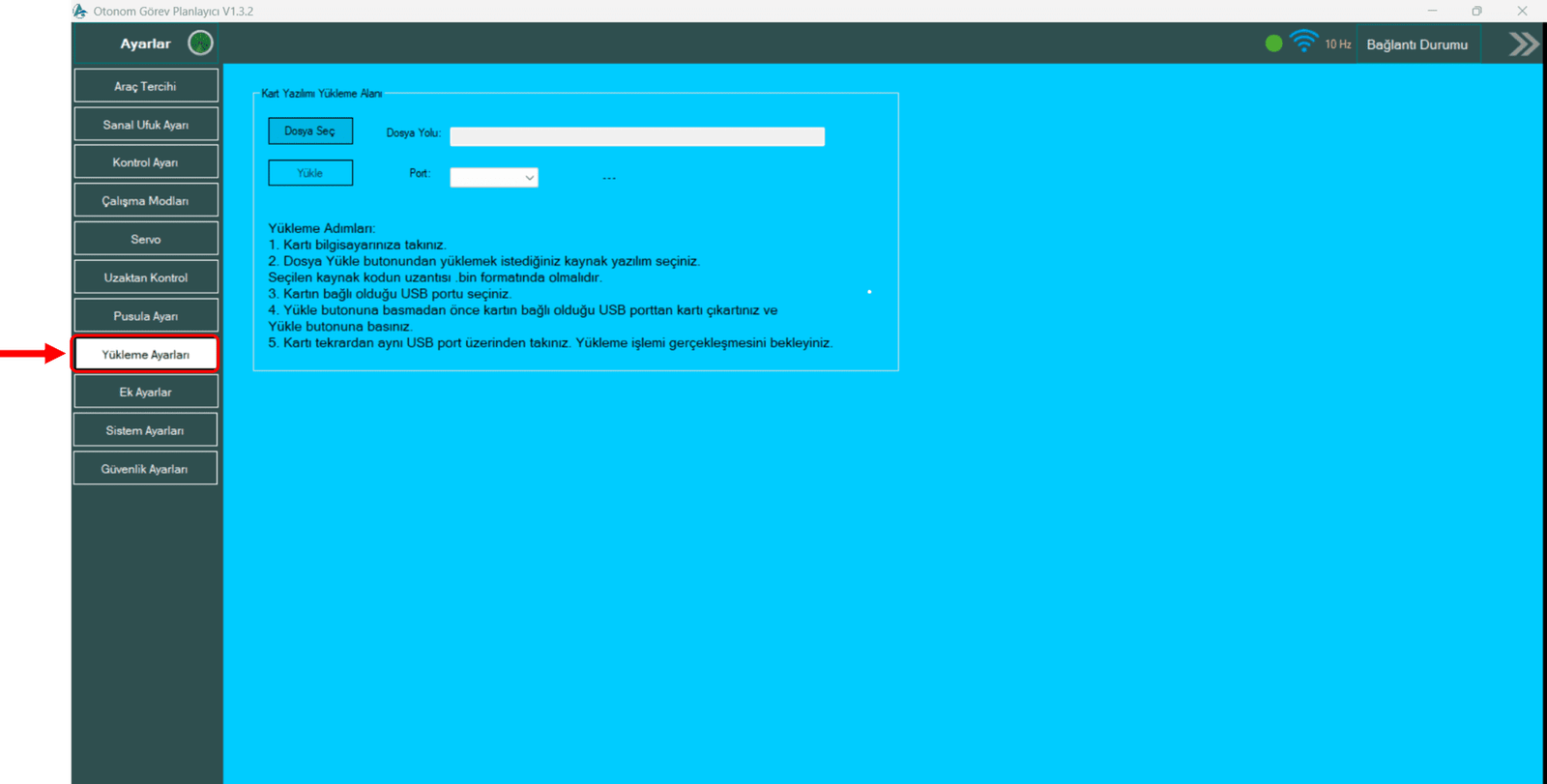
Yükleme Ayarları
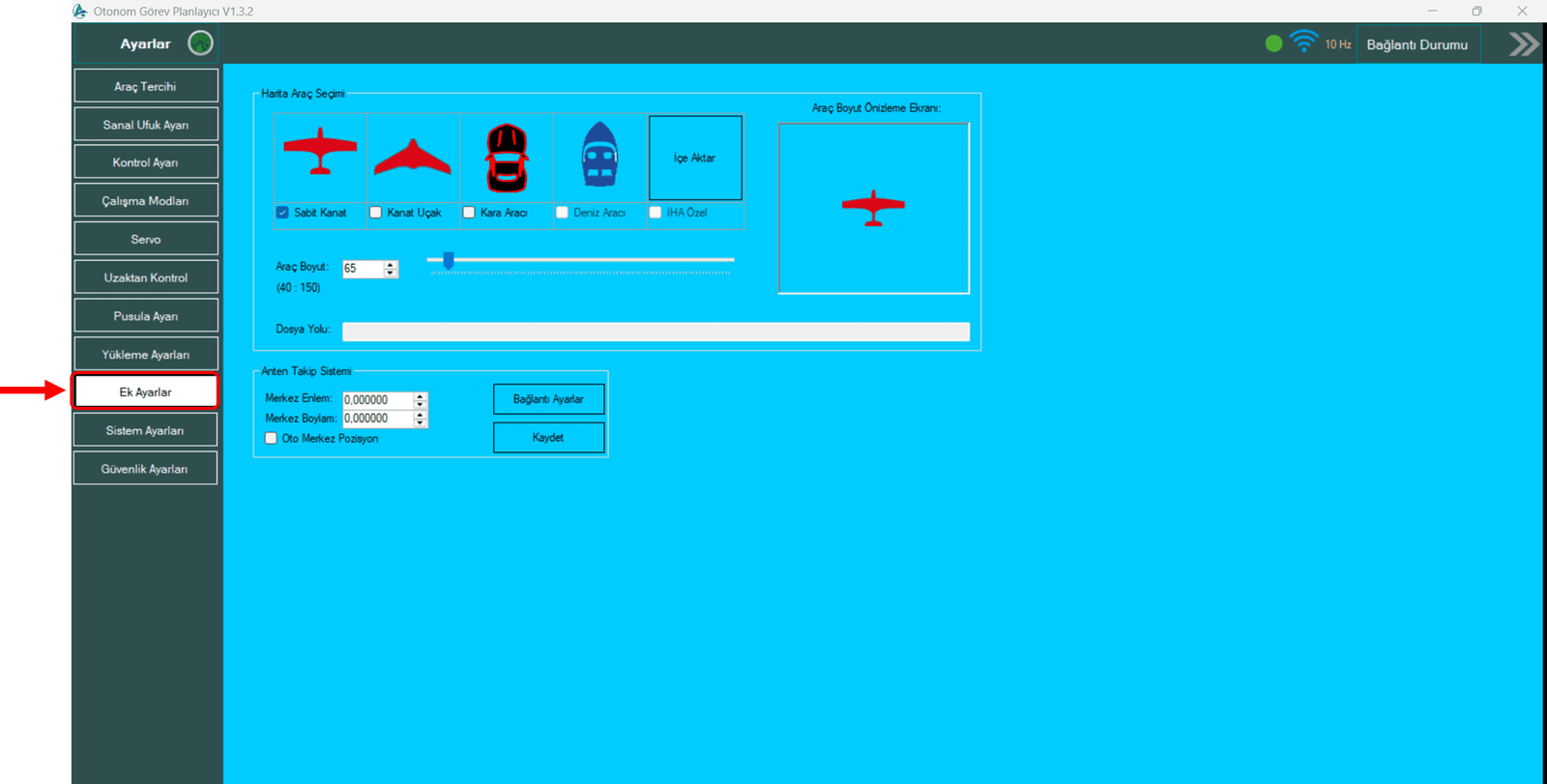
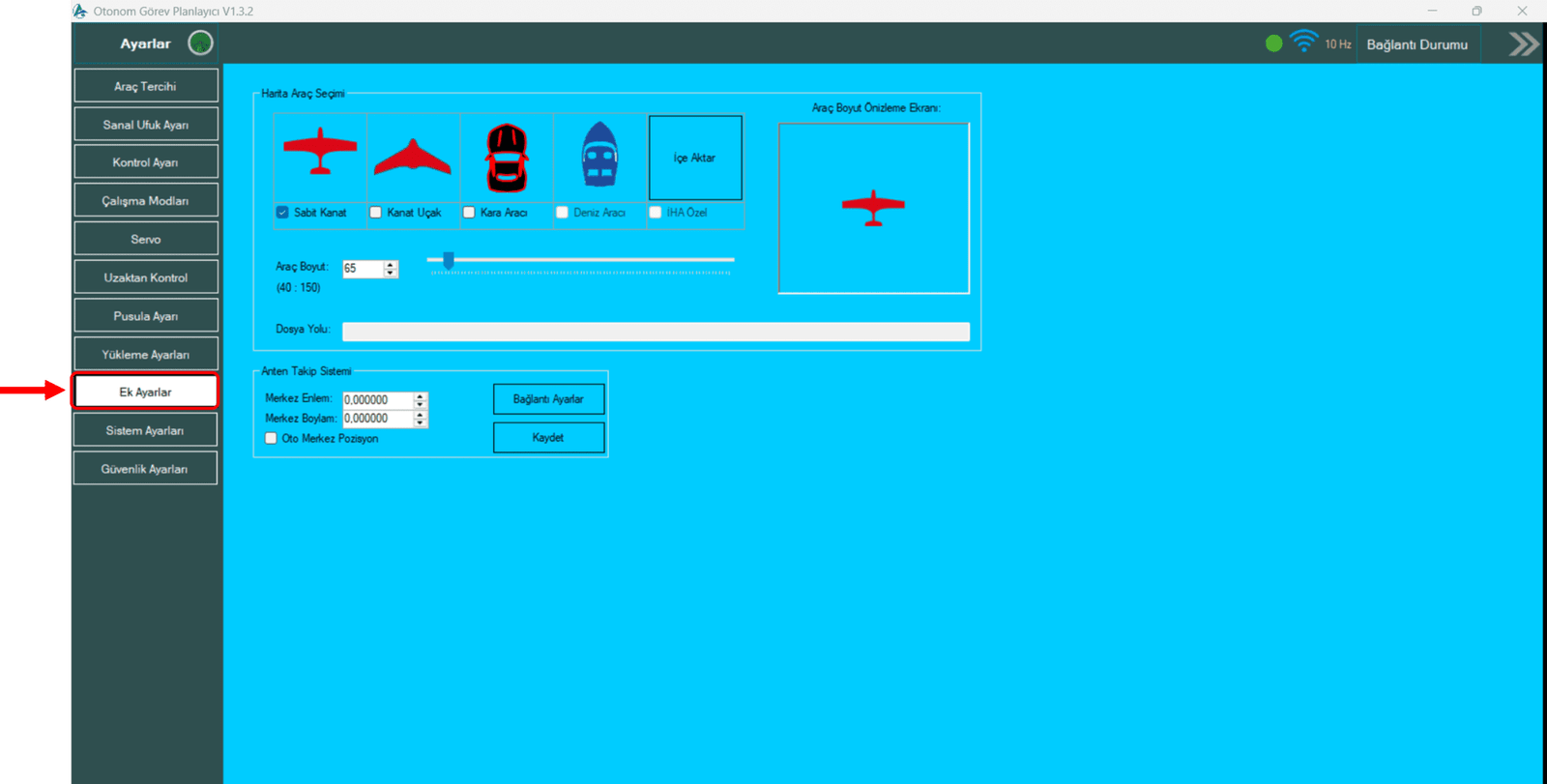
Ek Ayarlar
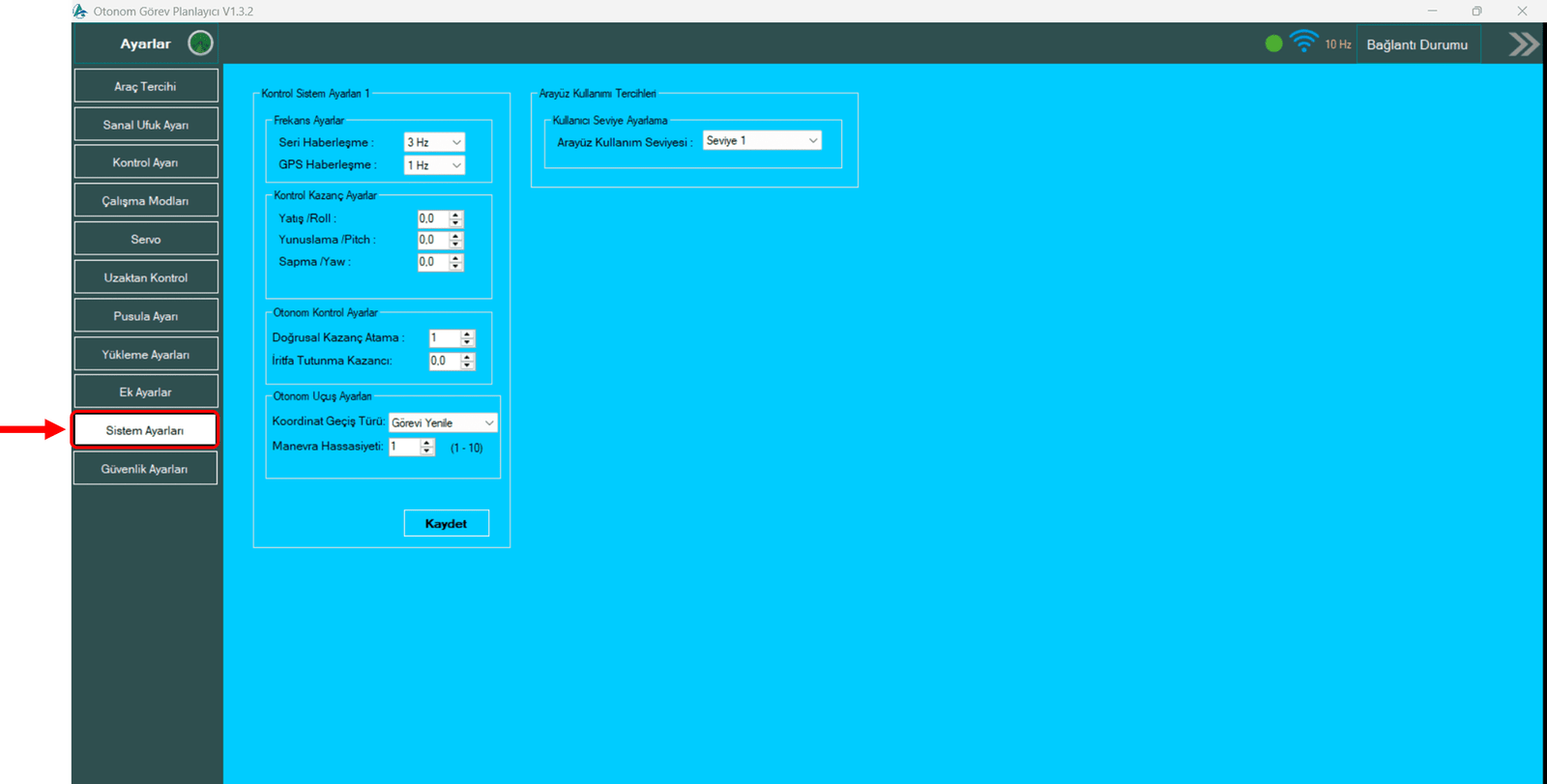
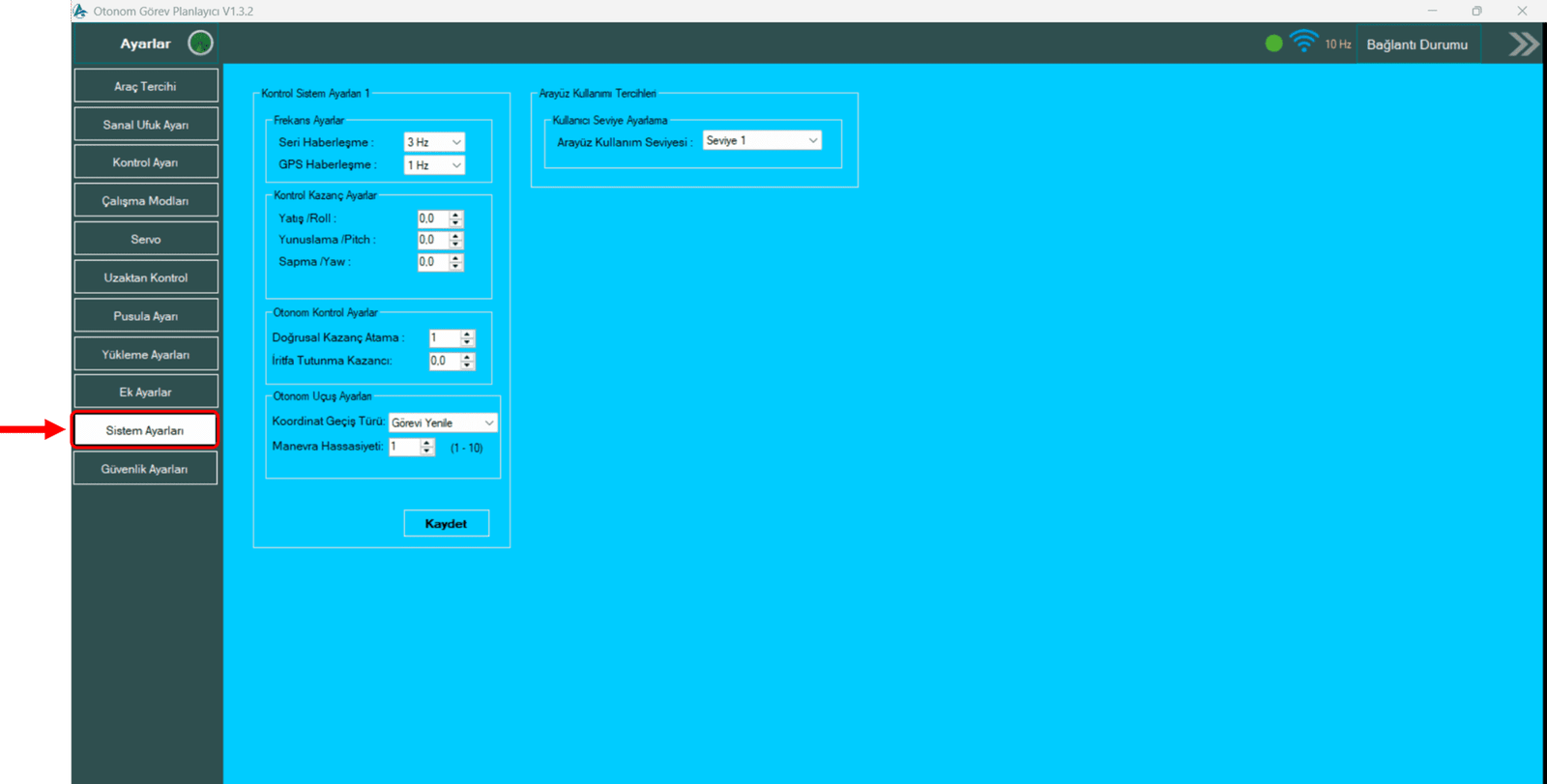
Sistem Ayarları
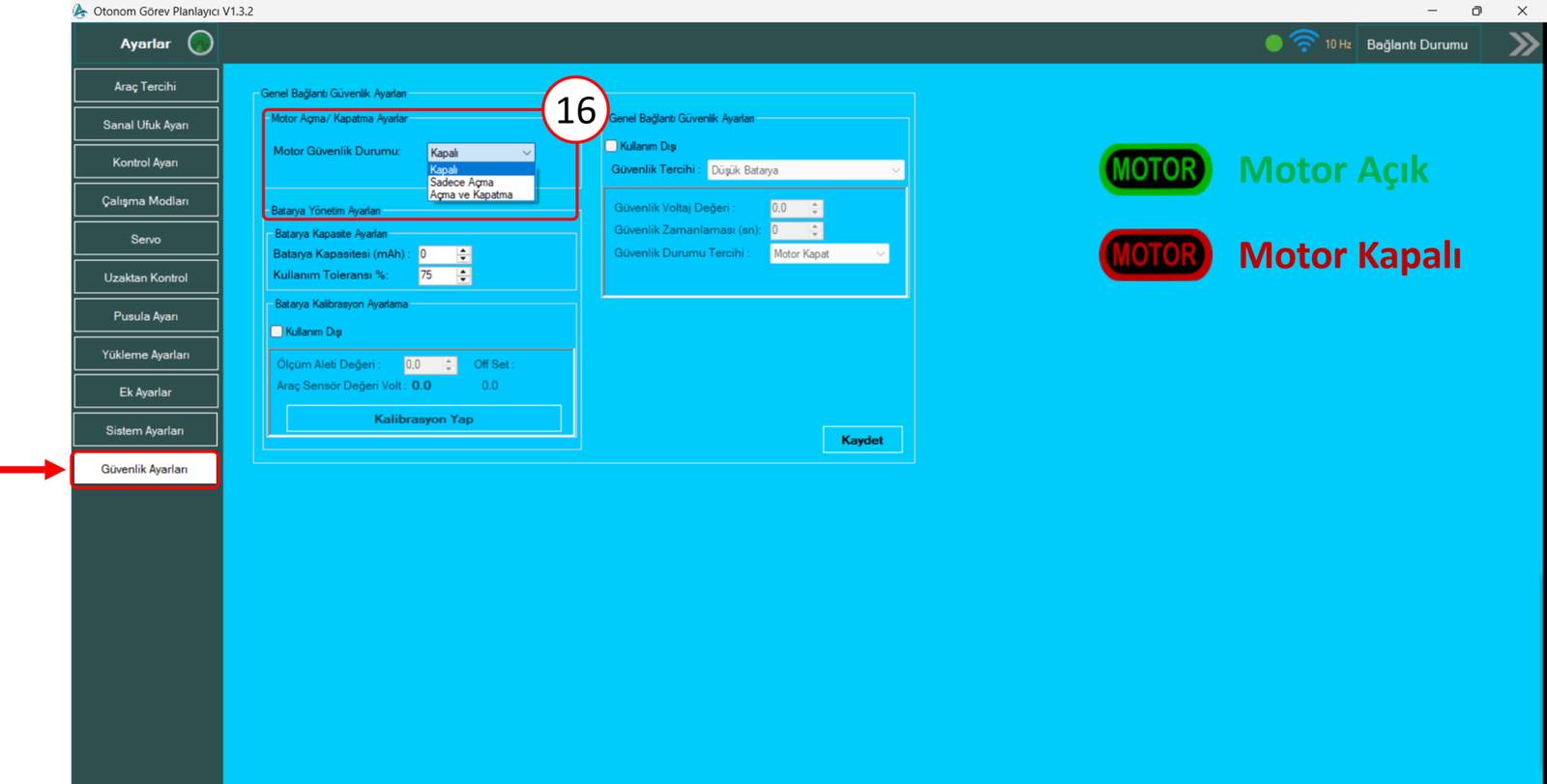
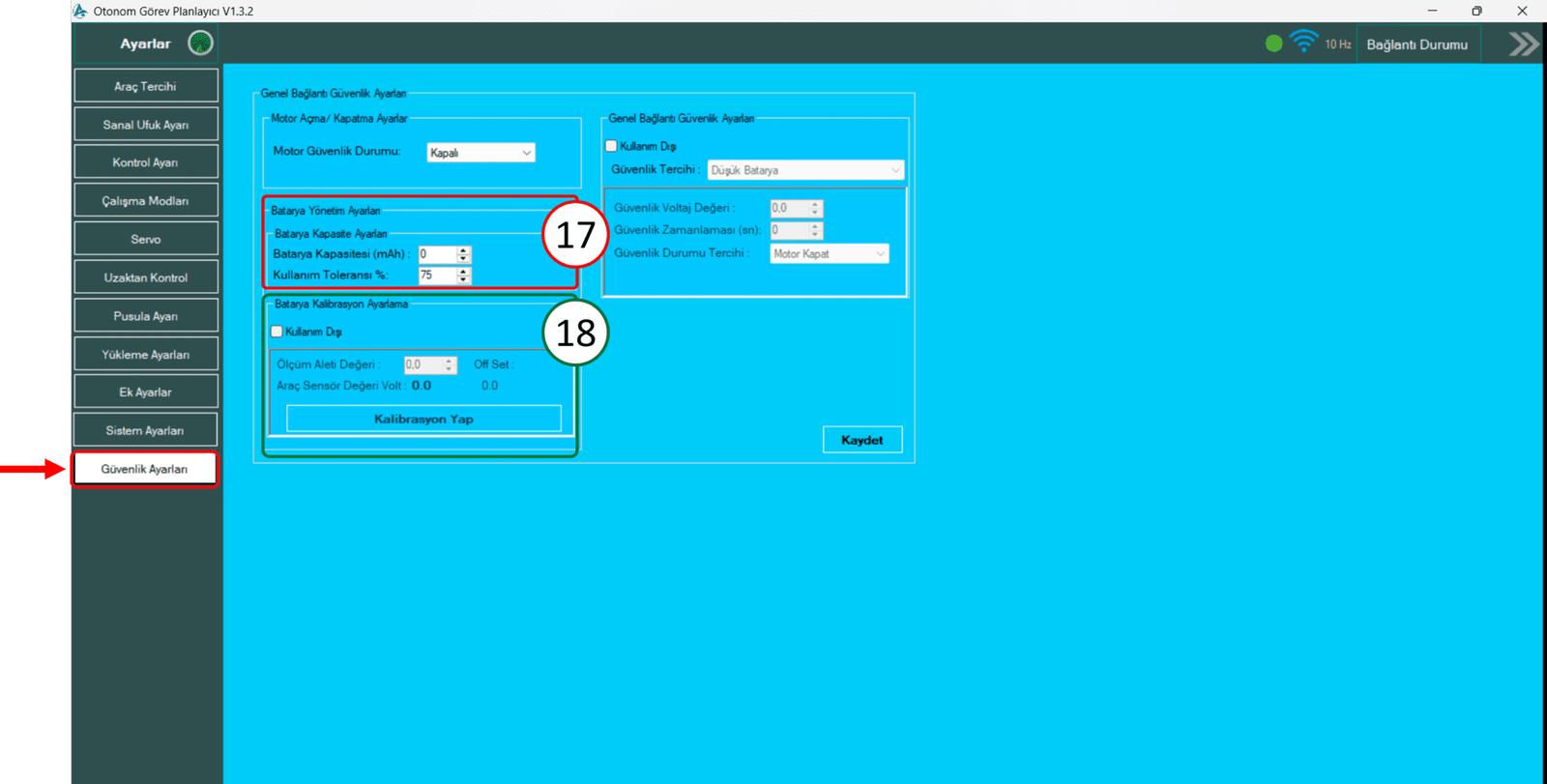
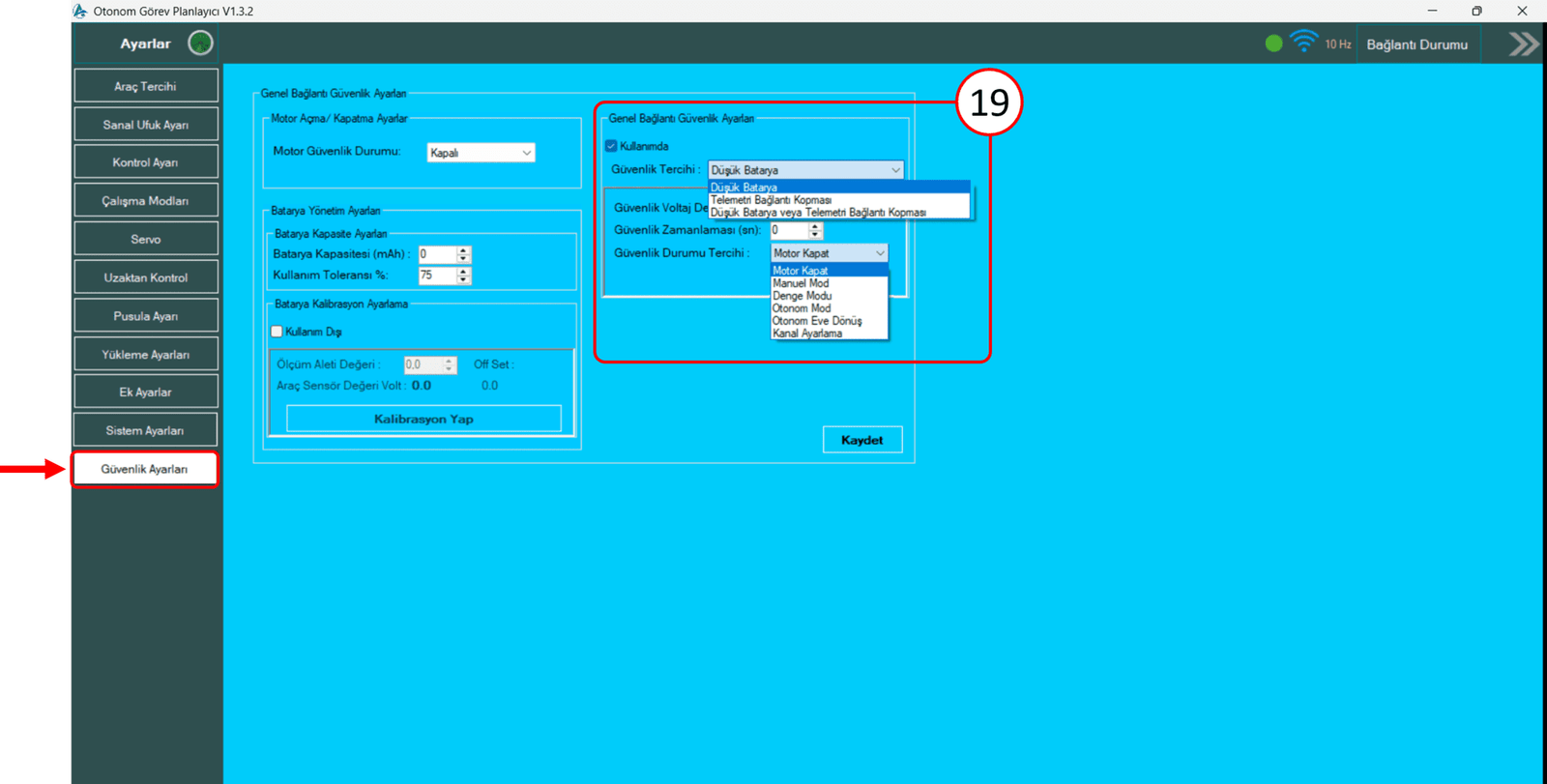
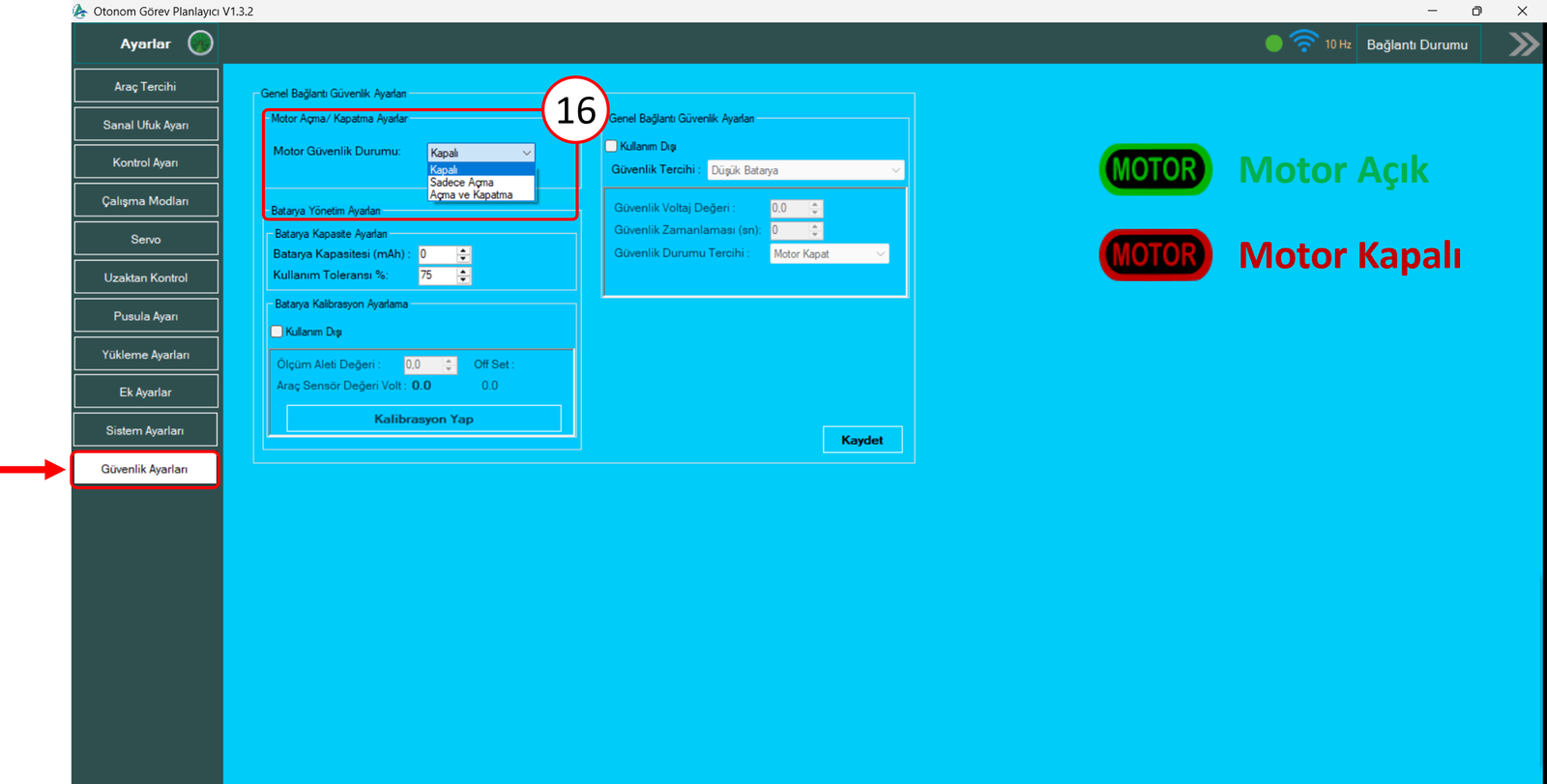
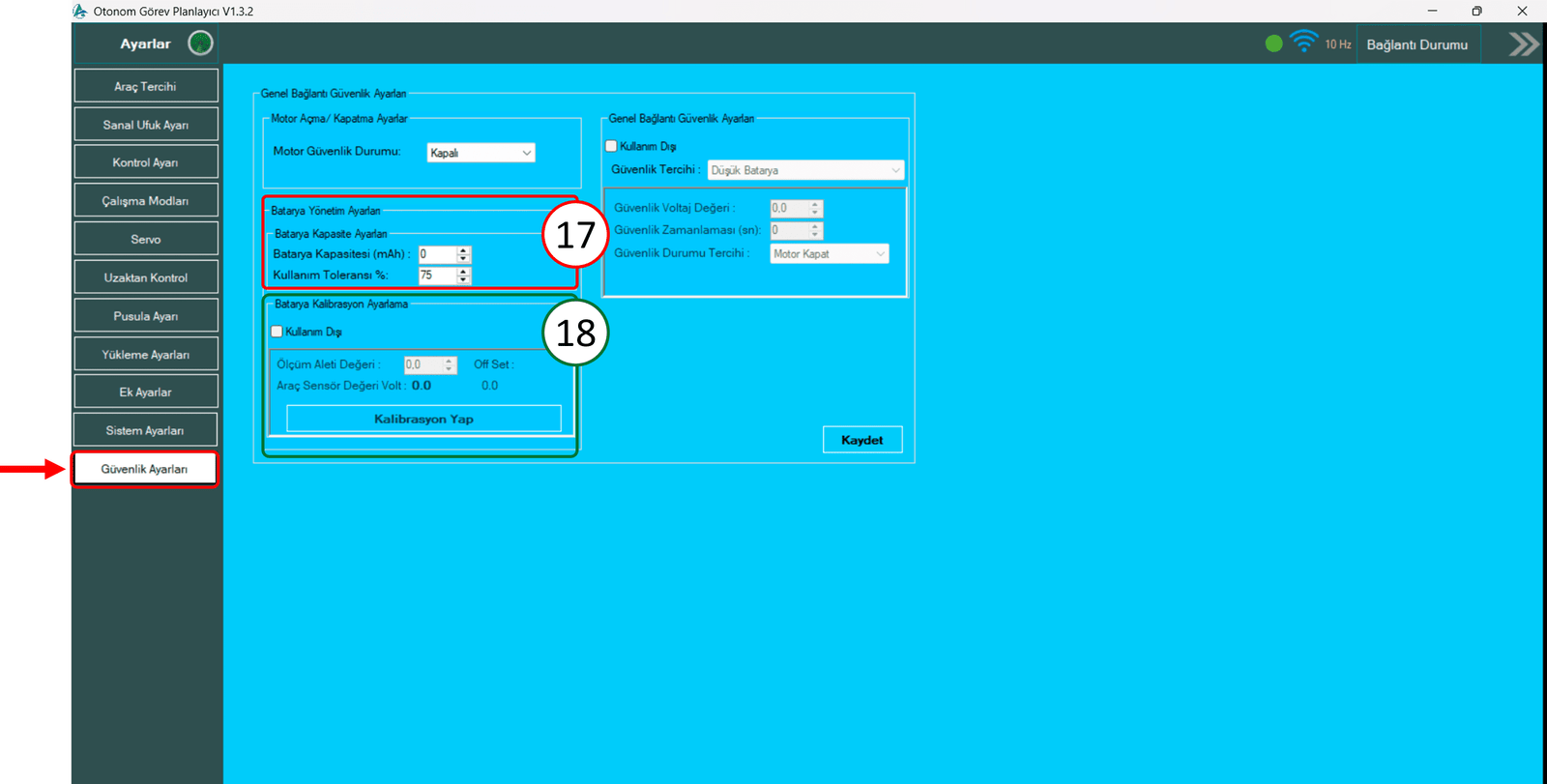
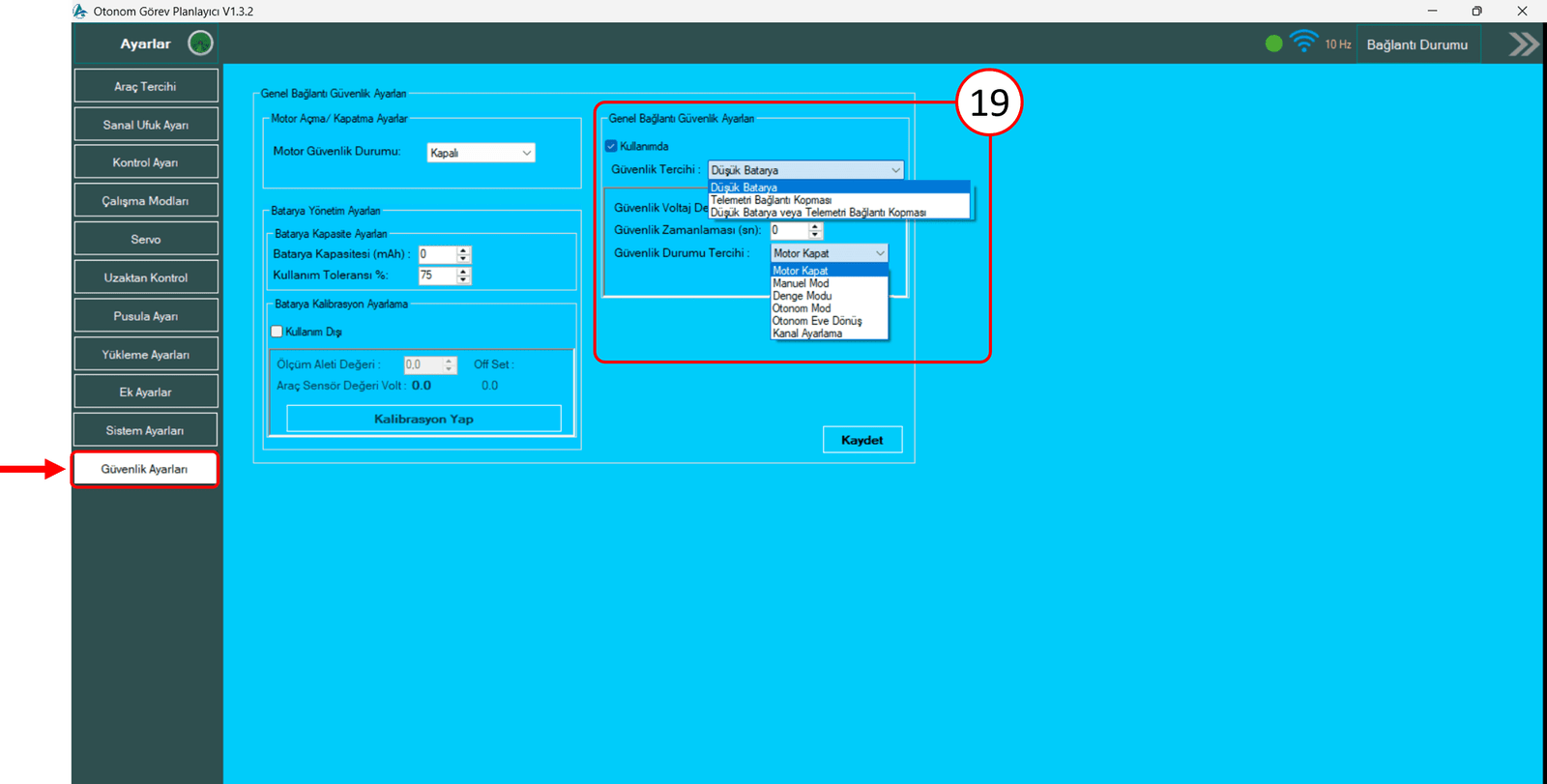
Güvenlik Ayarları
Doküman İndirme
Manuel Kontroller - YATIŞ

Manuel Kontroller - YUNUSLAMA

Manuel Kontroller - SAPMA

Pusula Ayarı
Yükleme Ayarları
Ek Ayarlar
Sistem Ayarları
Güvenlik Ayarları