
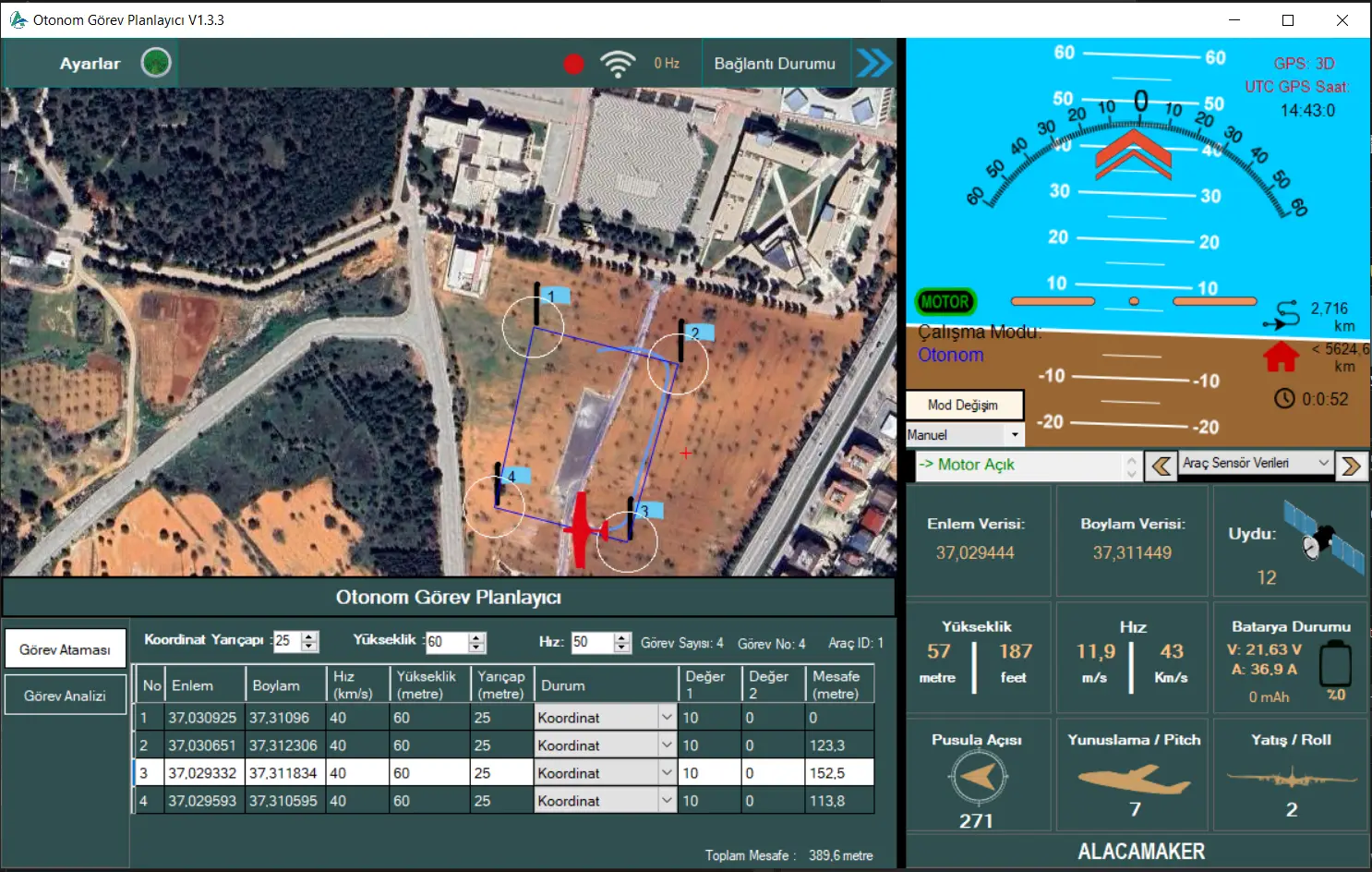
Ana Ekran

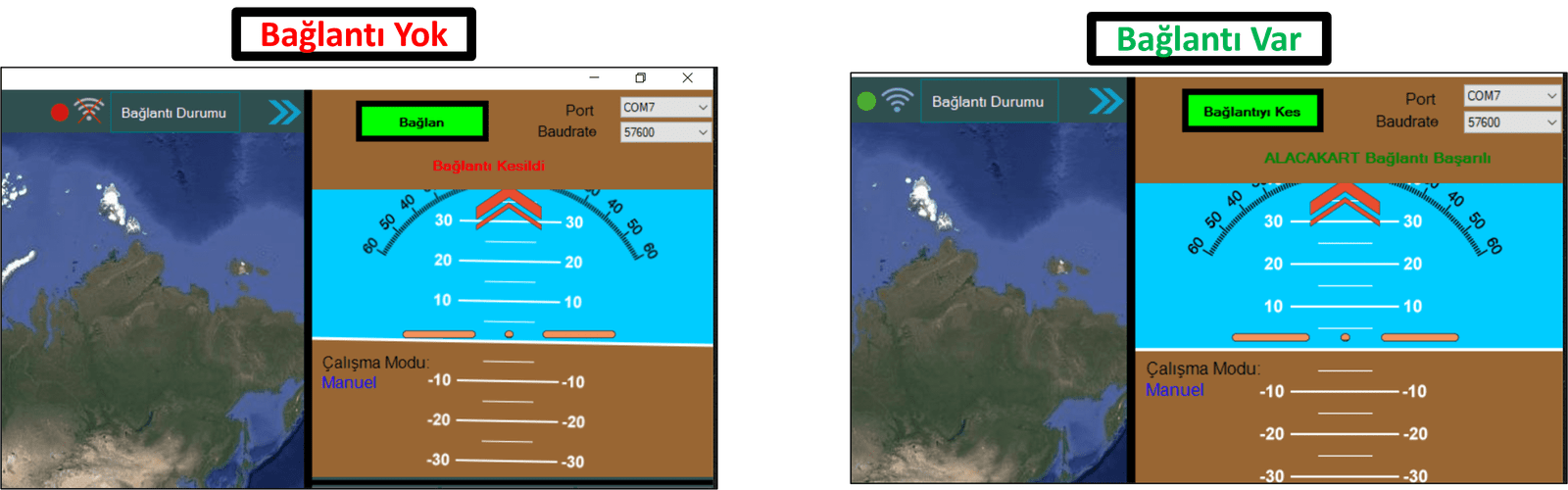
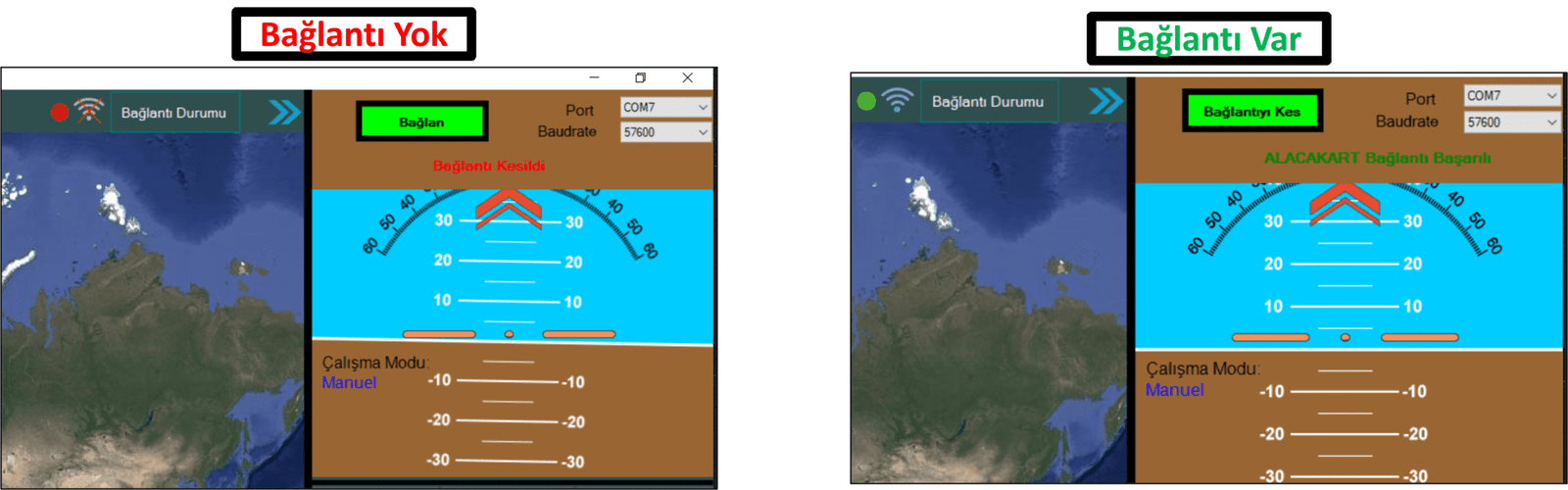
OGP Bağlantı
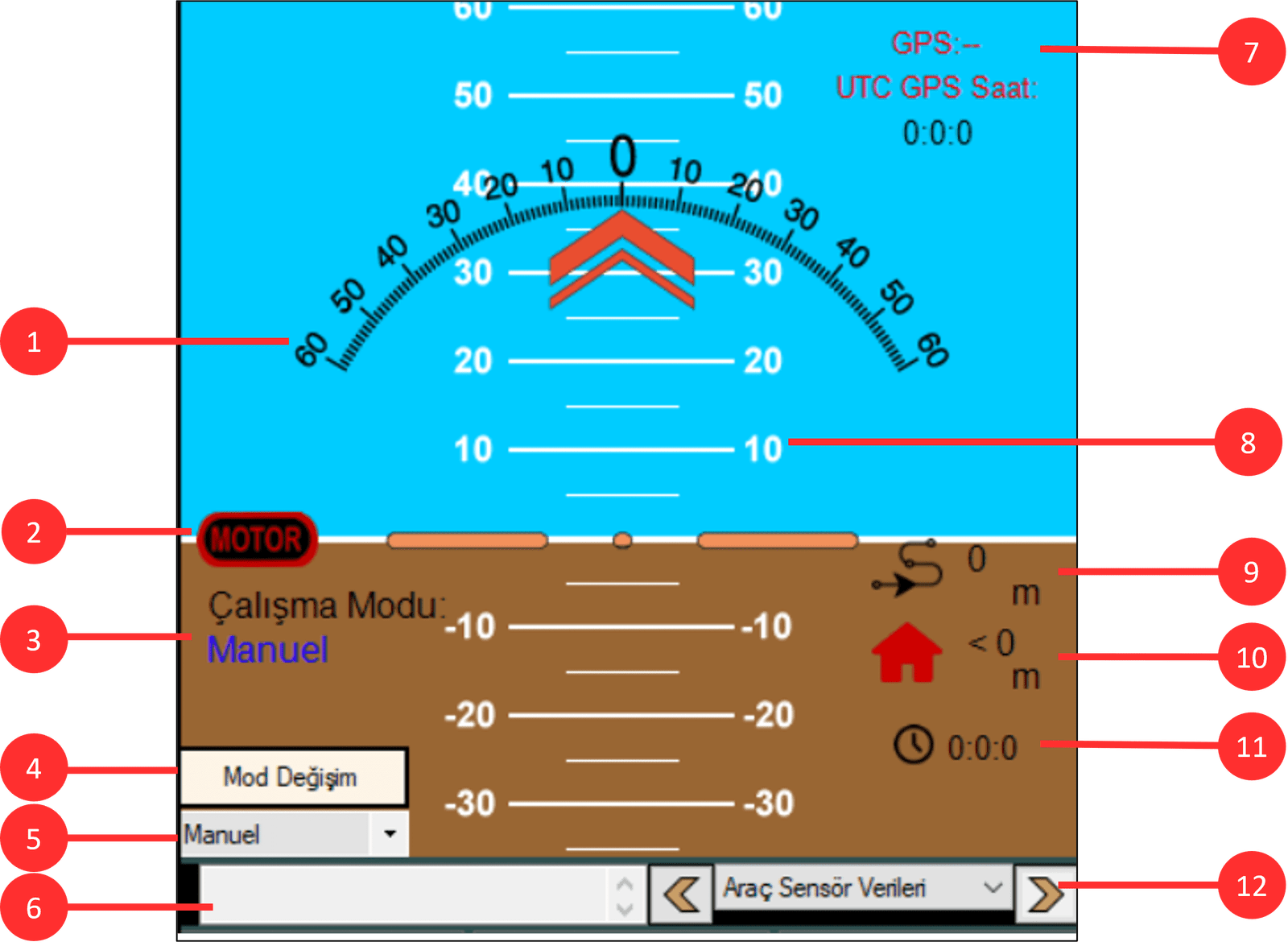
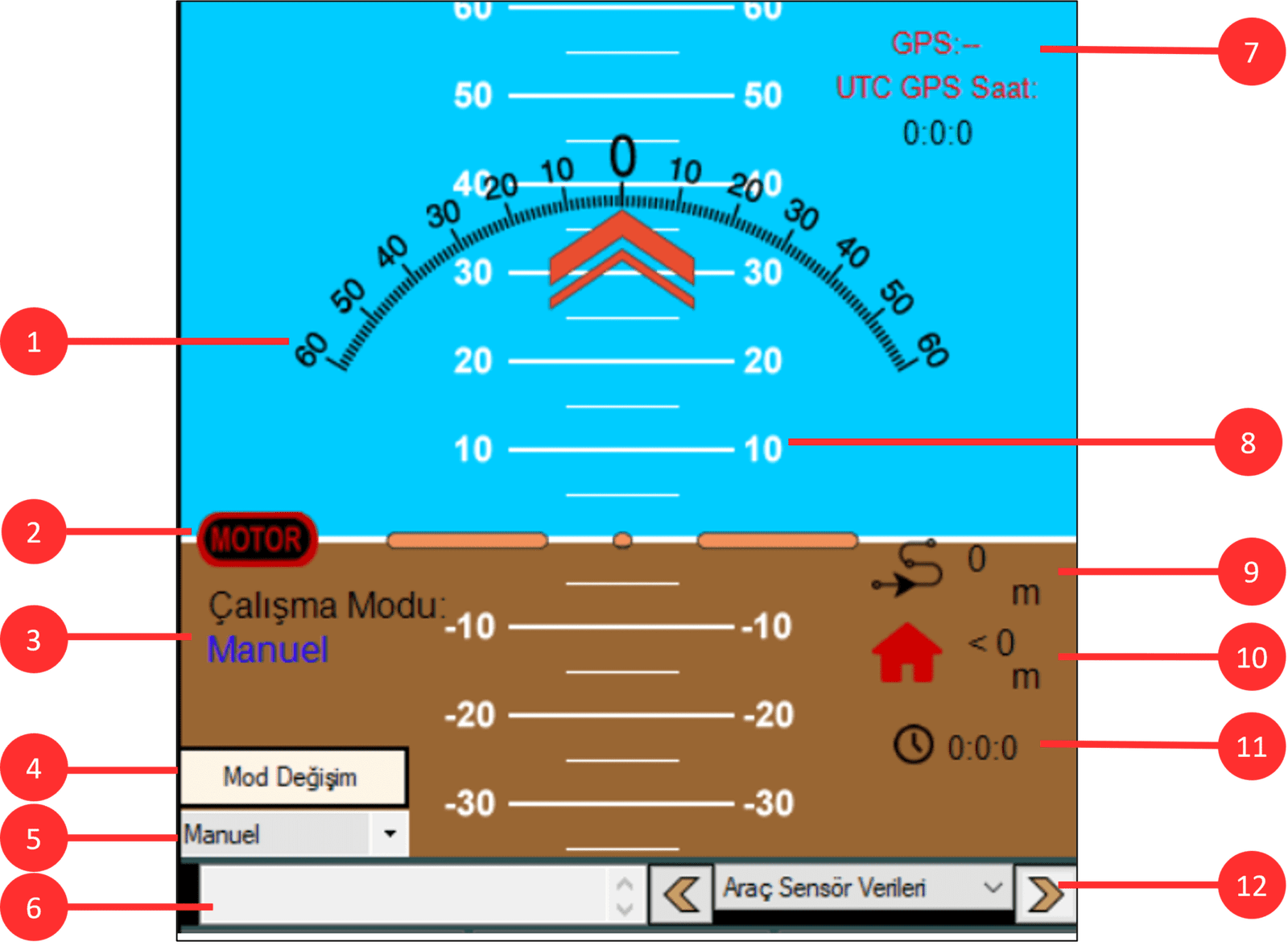
Gösterge Paneli
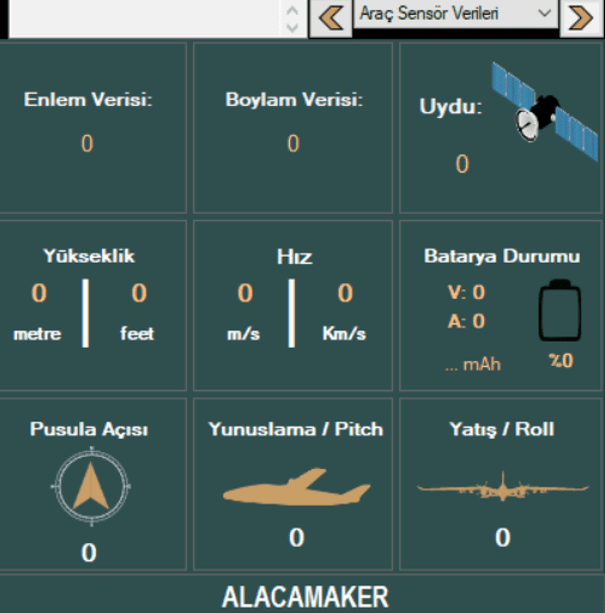
Veri Paneli
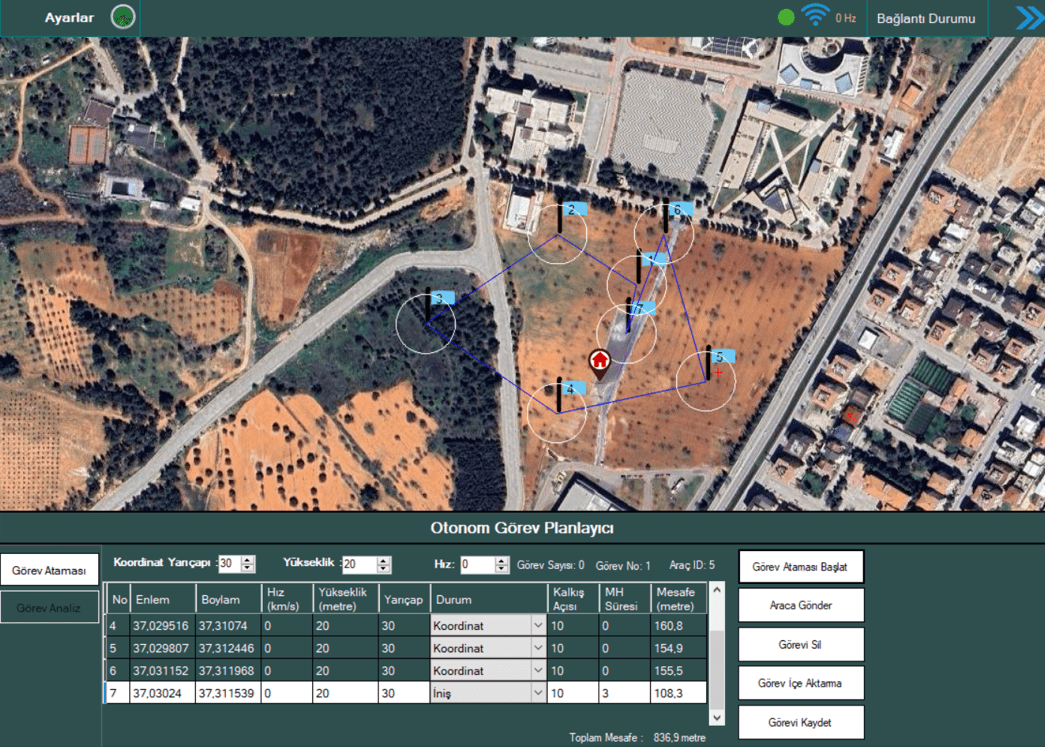
Otonom Görev Planlama

Harita
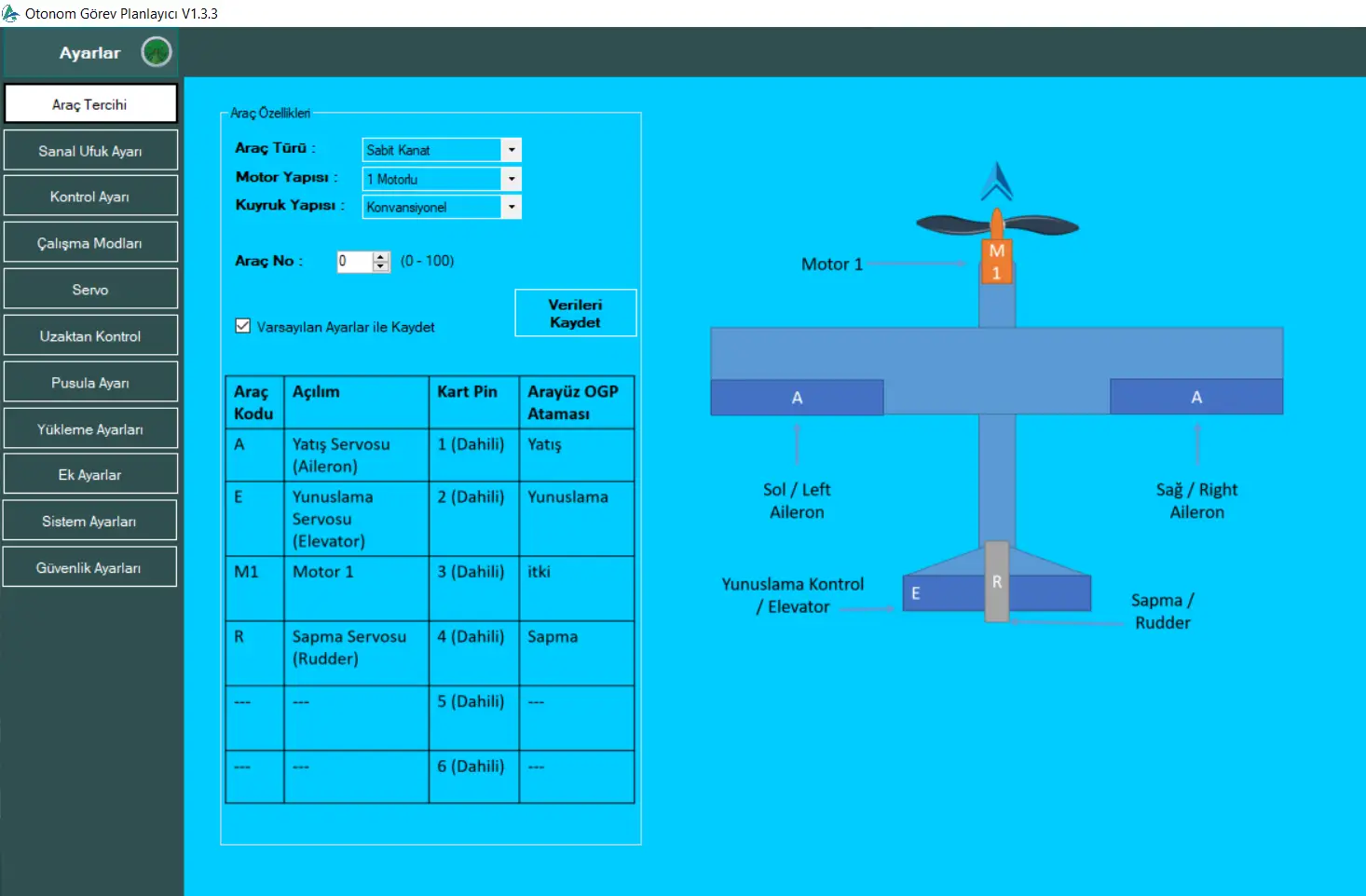
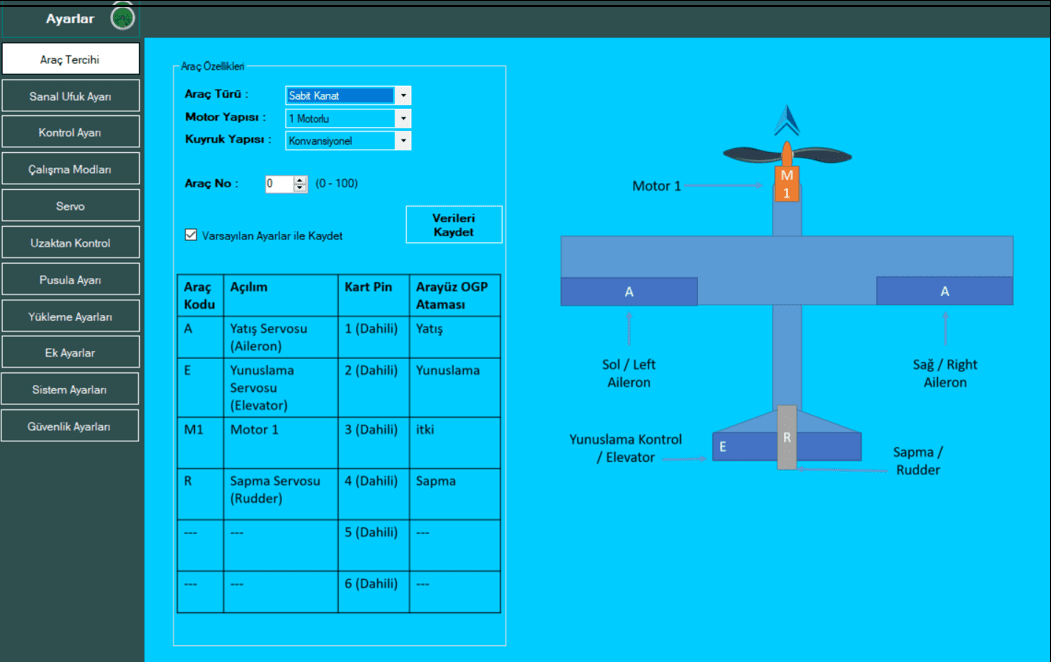
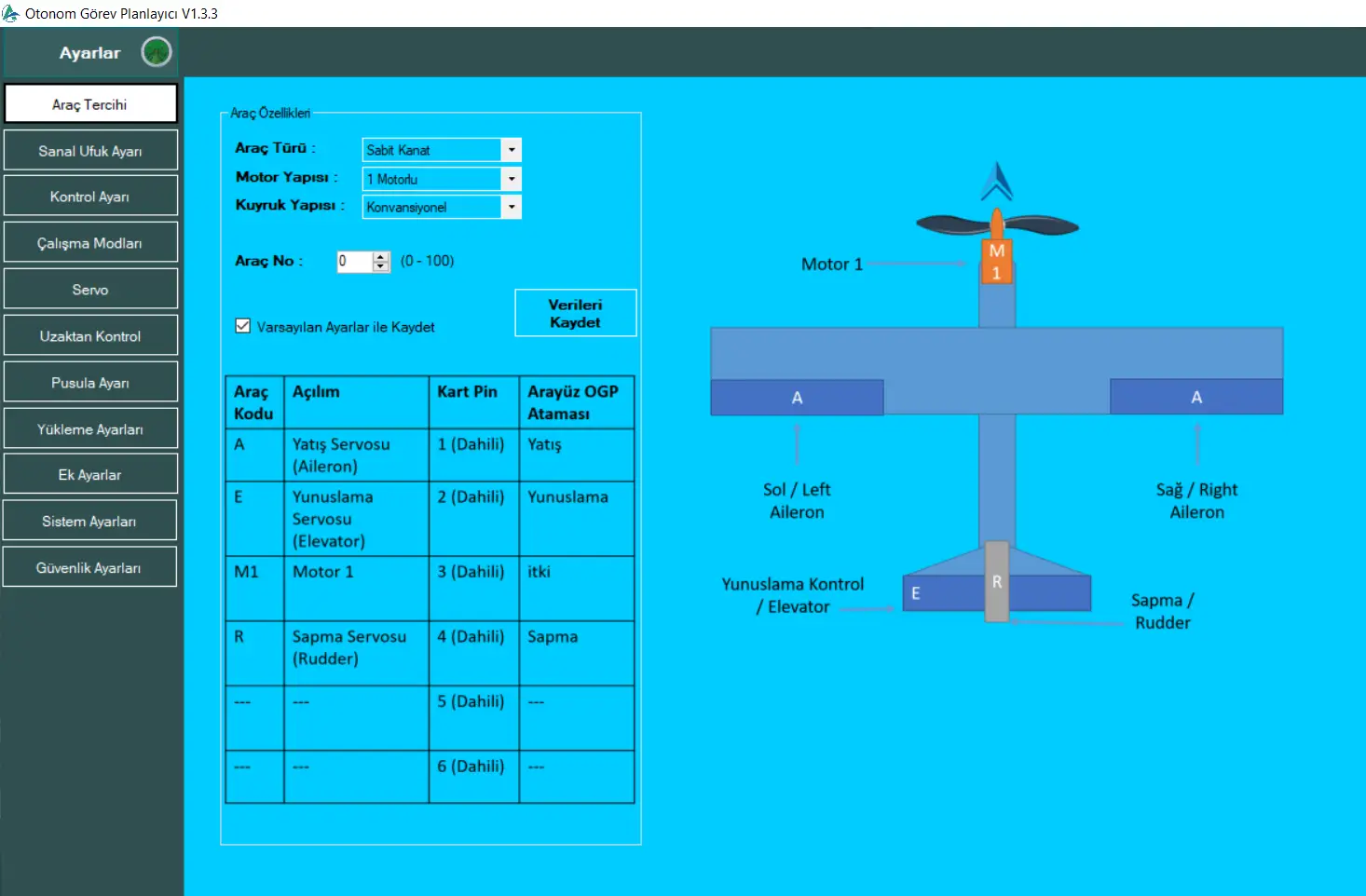
Ayarlar/Araç Tercihi
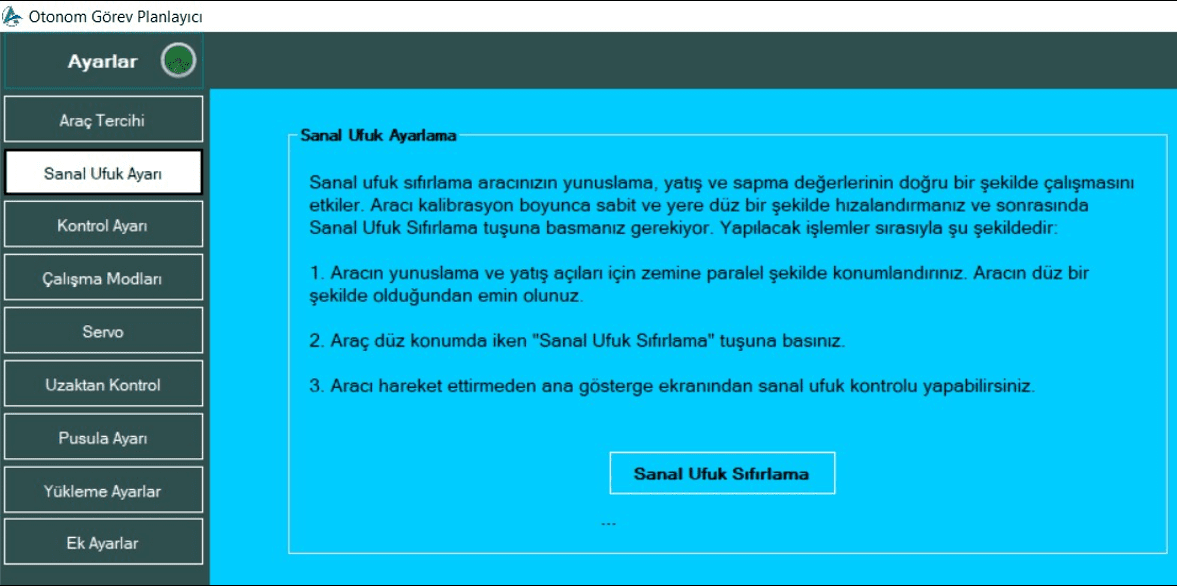
Ayarlar/Sanal Ufuk
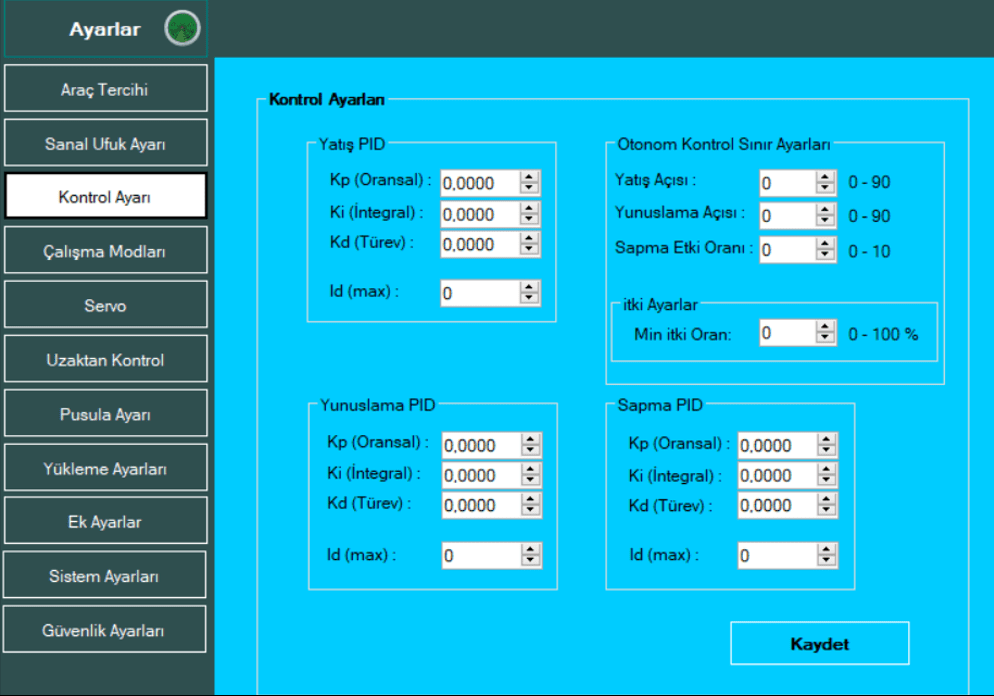
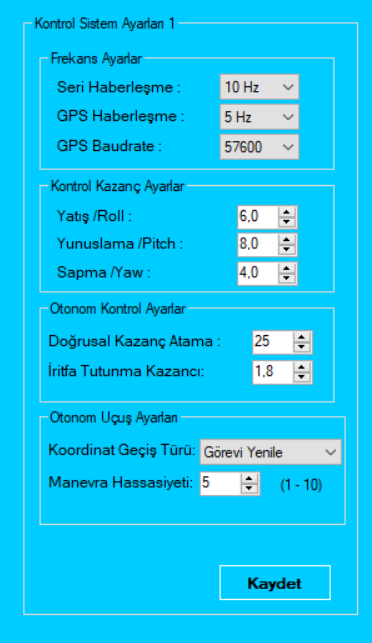
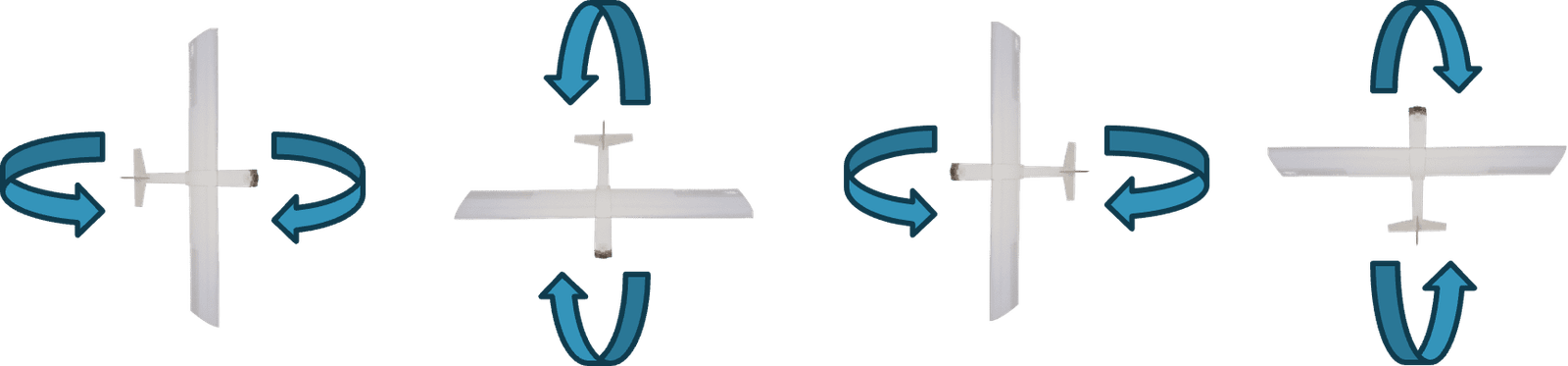
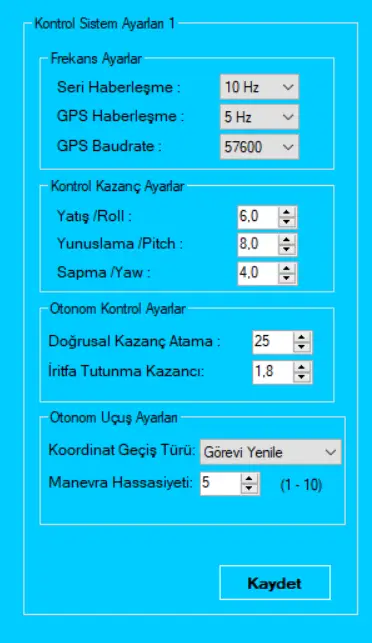
Ayarlar/Kontrol Ayarları
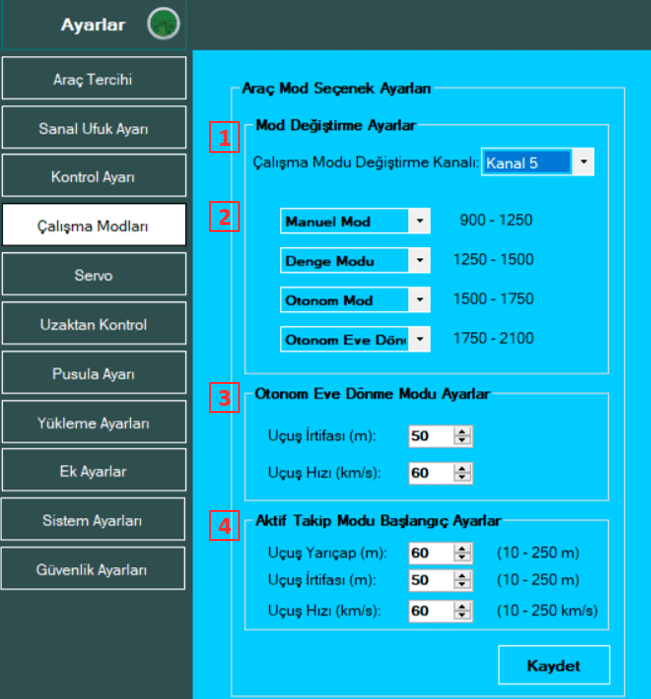
Ayarlar/Çalışma Modları
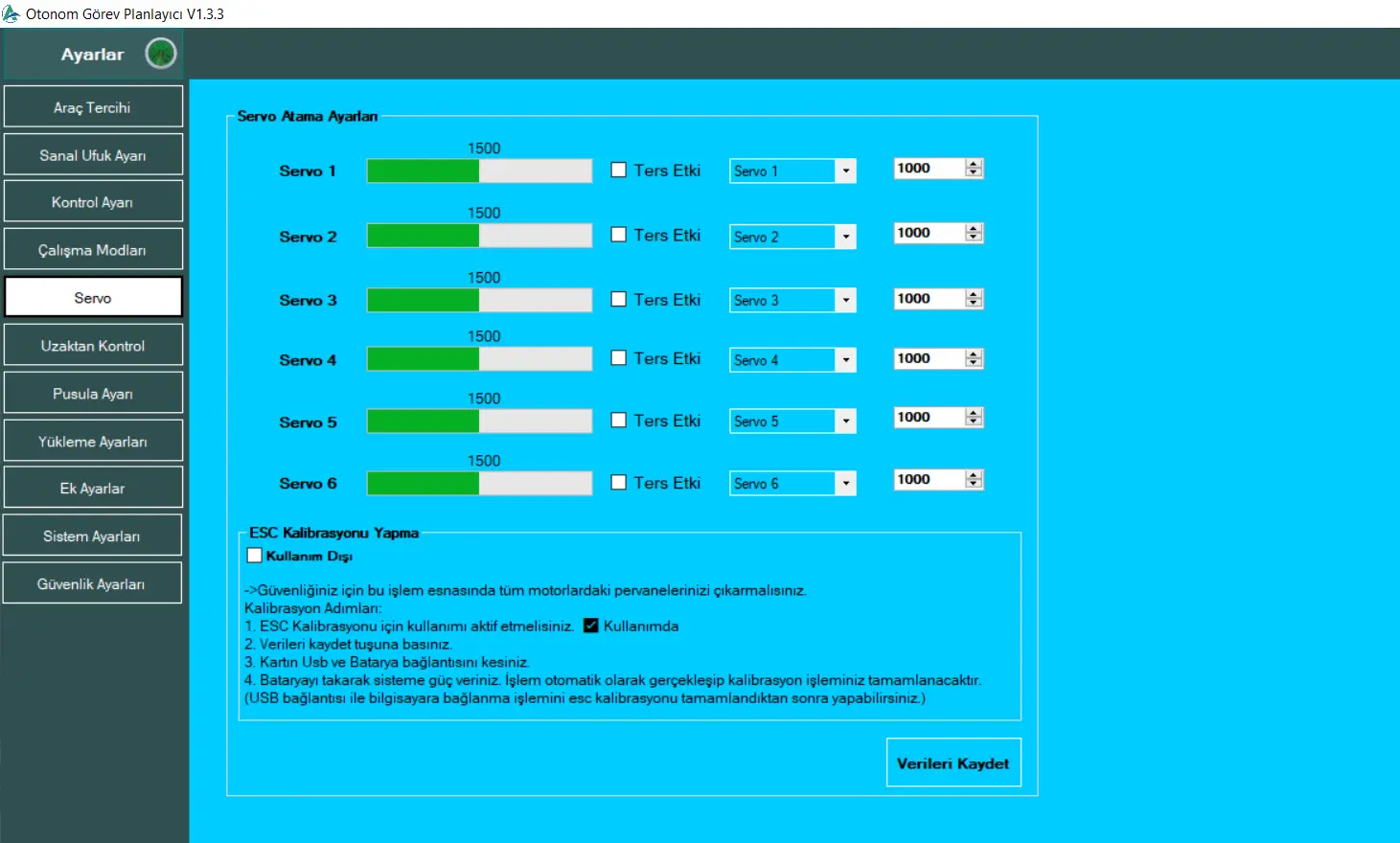
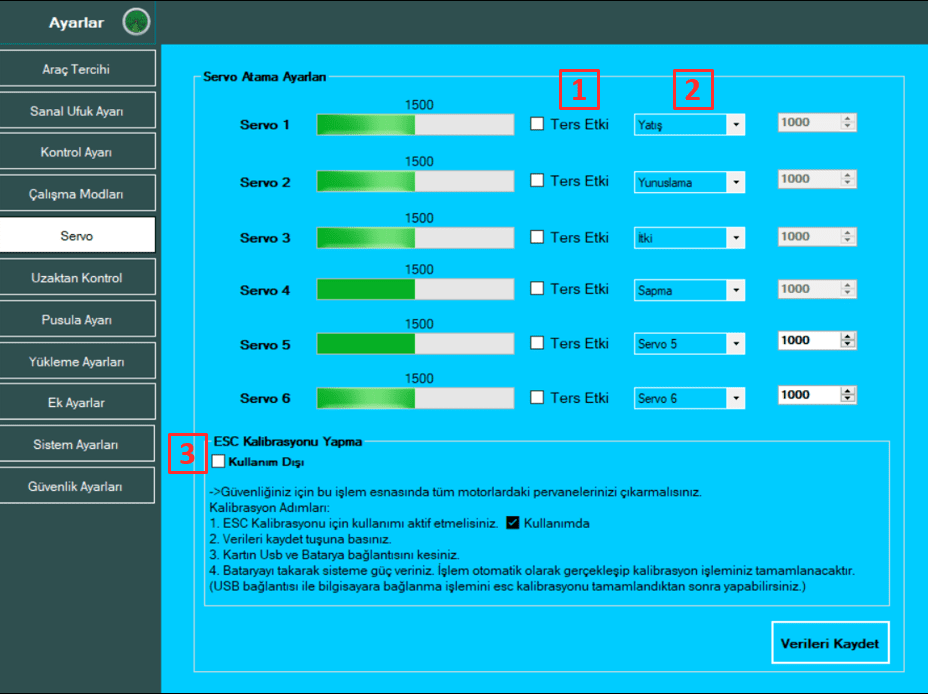
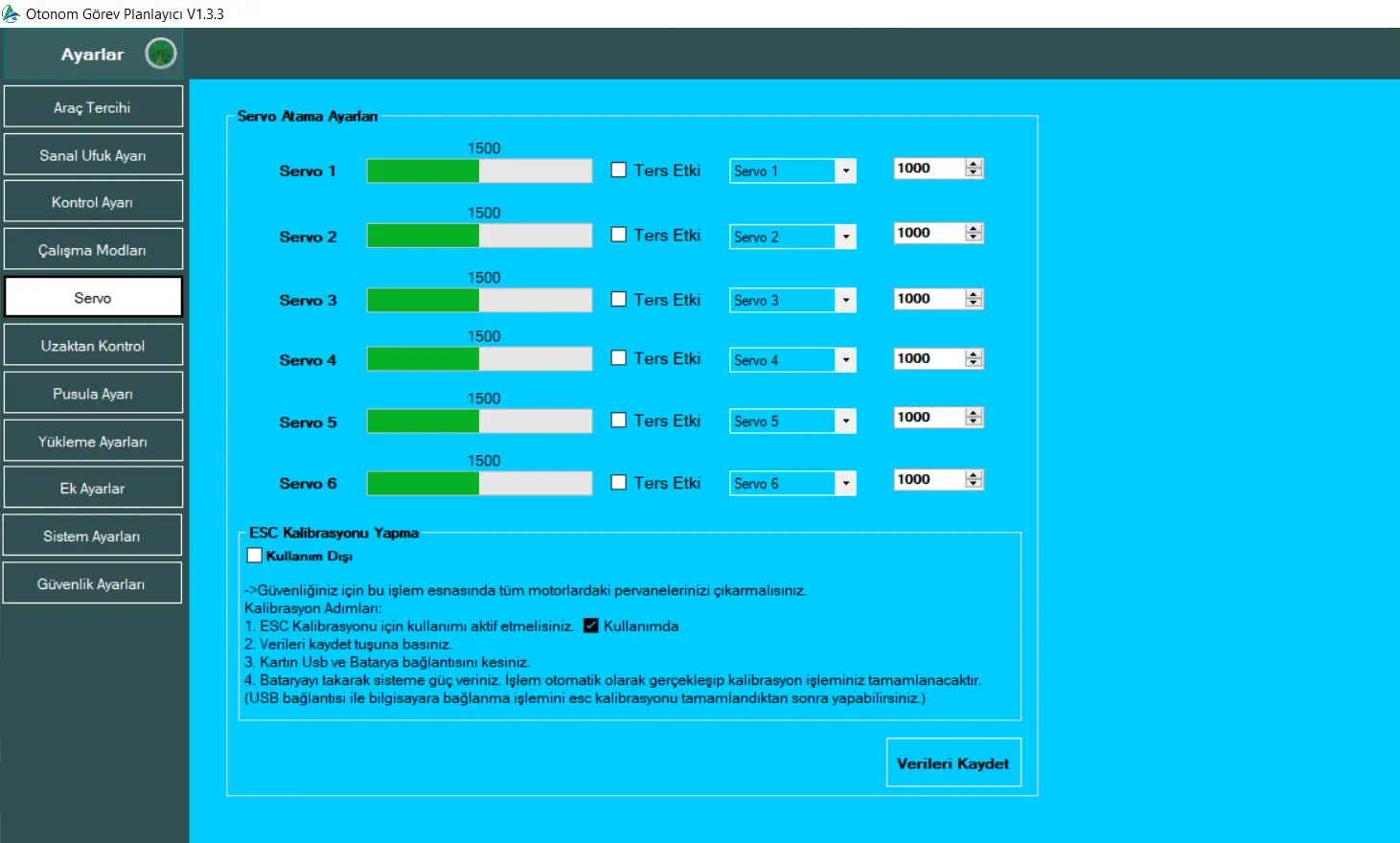
Ayarlar/Servo
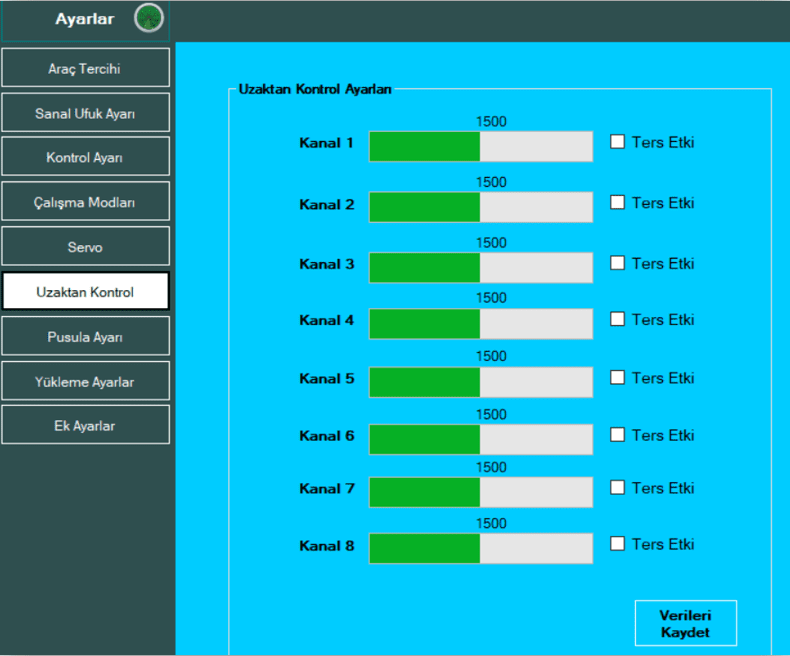
Ayarlar/Uzaktan Kontrol
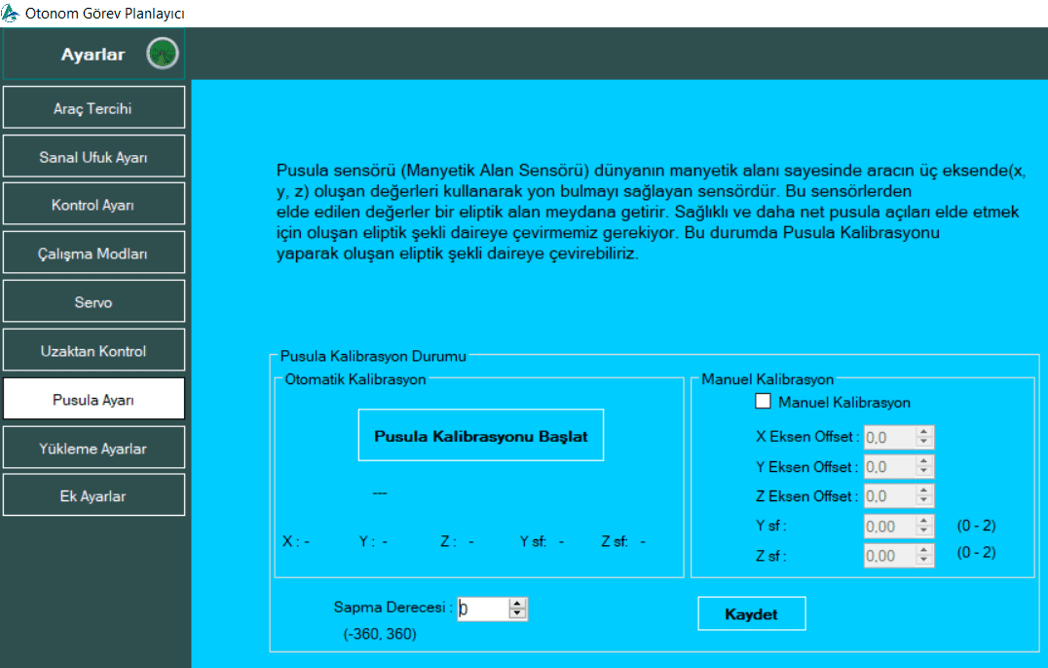
Ayarlar/Pusula Ayarı
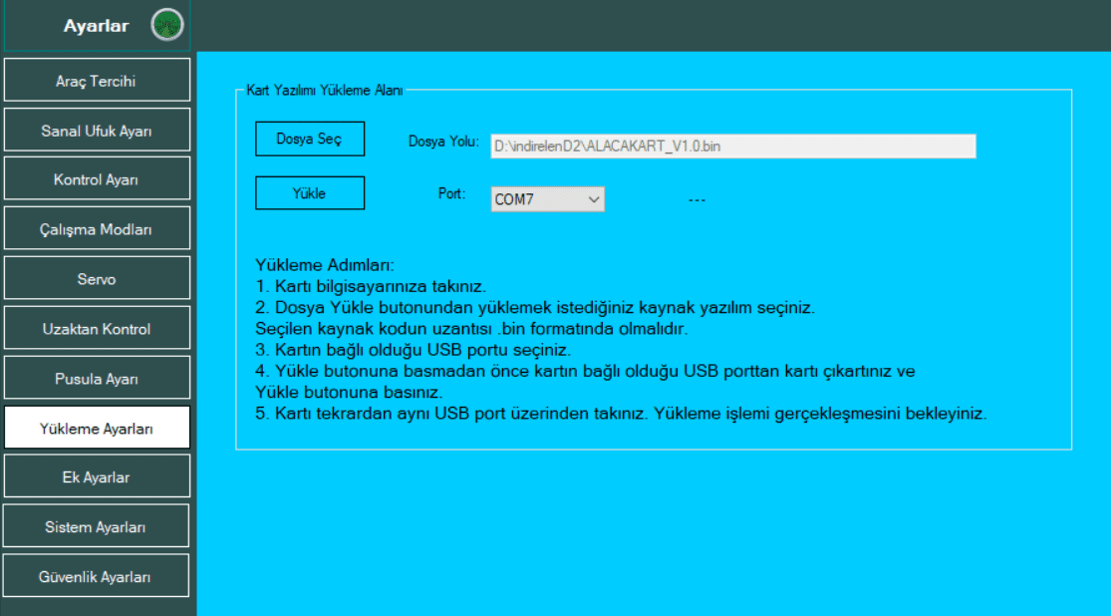
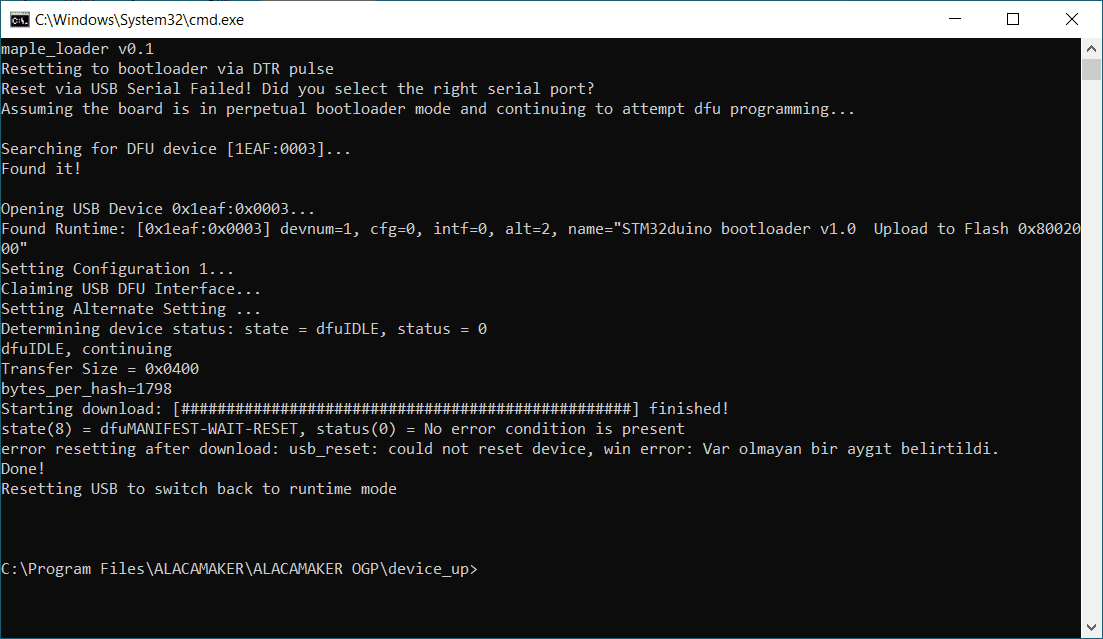
Ayarlar/Yükleme Ayarları
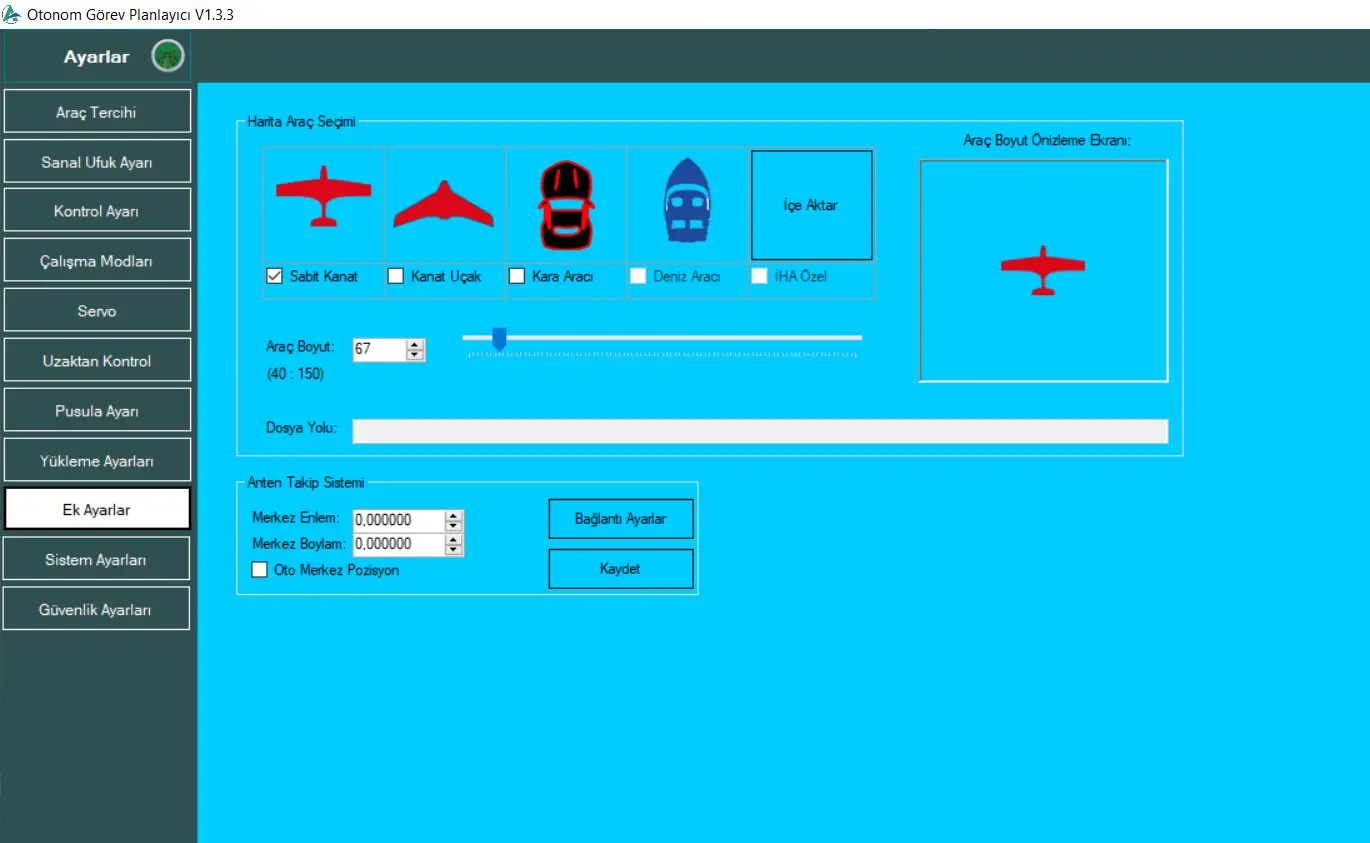
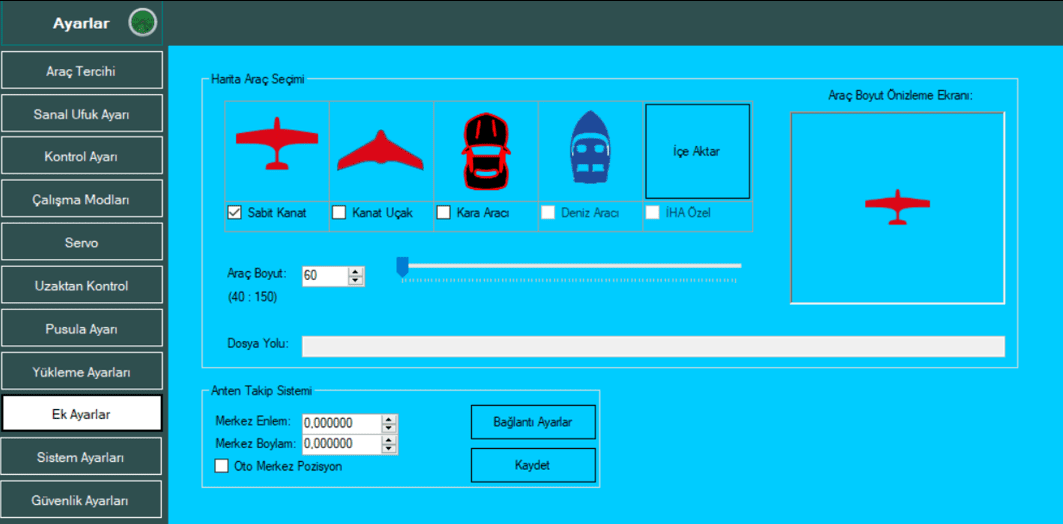
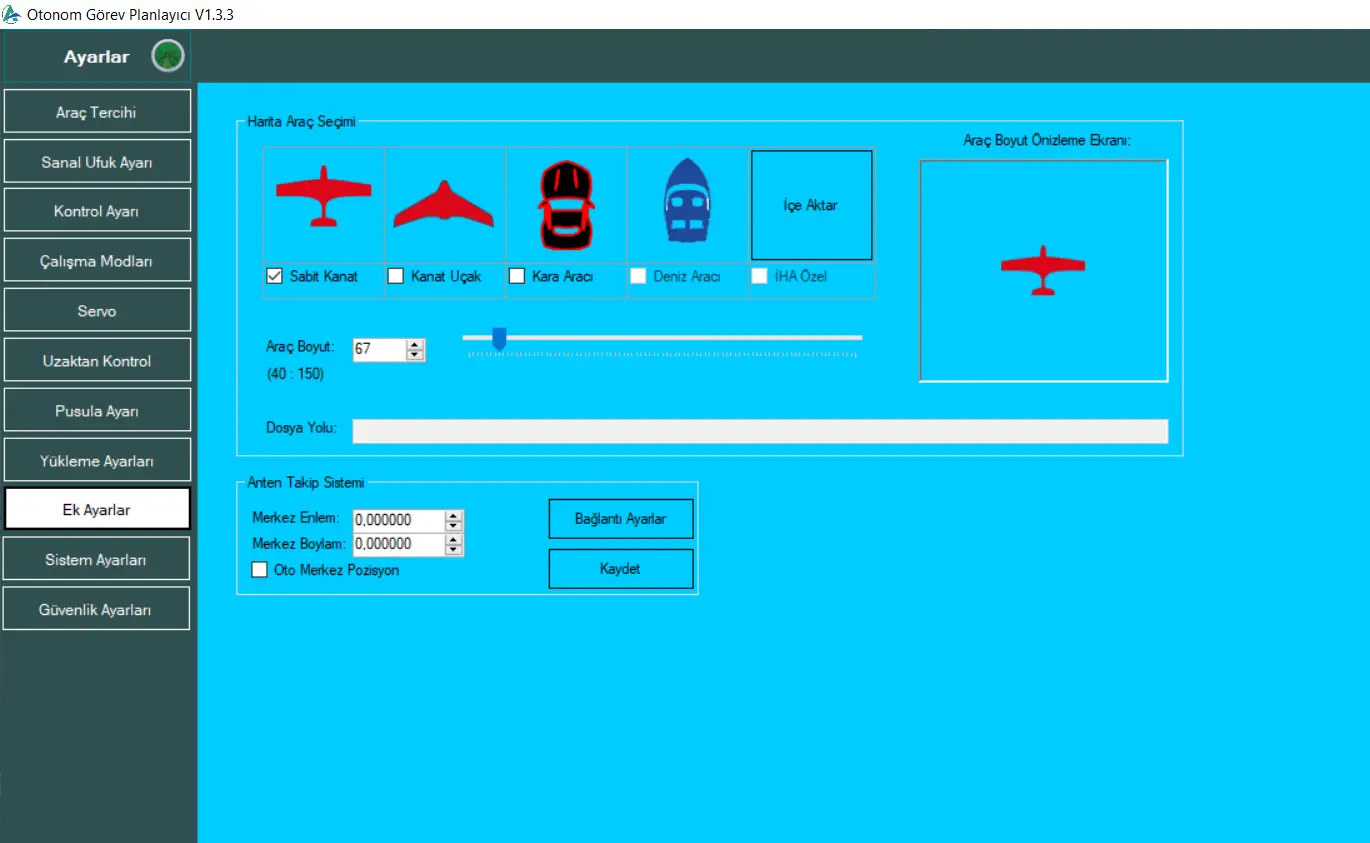
Ayarlar/Ek Ayarlar
Ayarlar/Sistem Ayarları
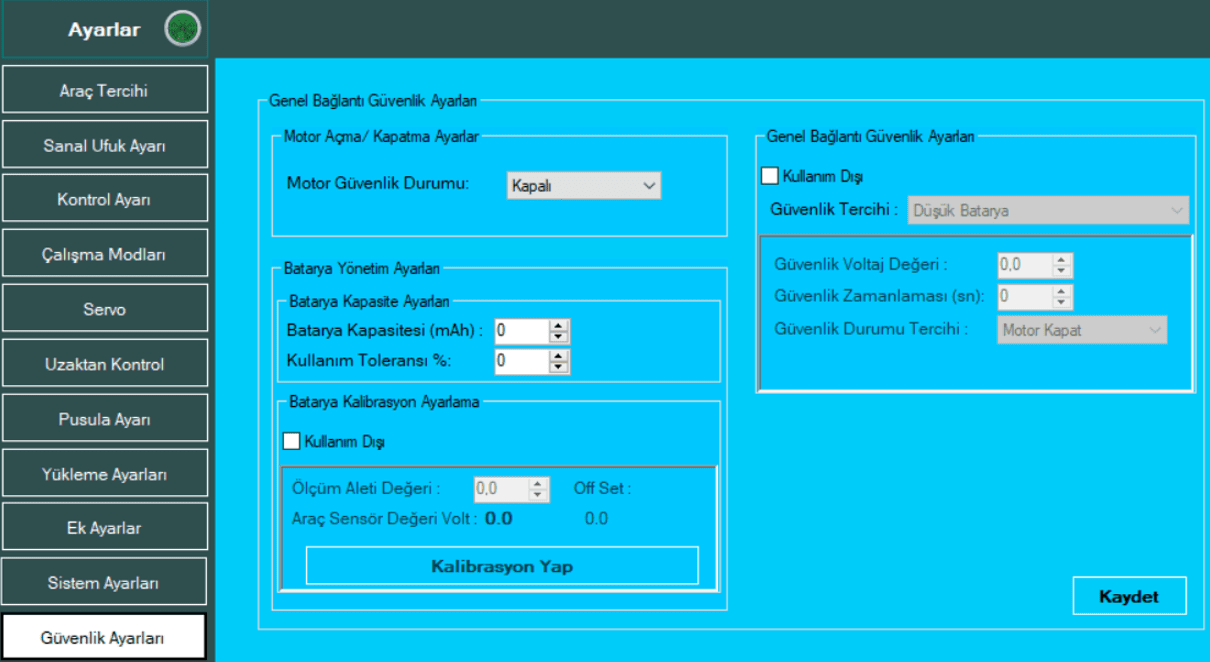
Ayarlar/Güvenlik Ayarları
Doküman İndirme
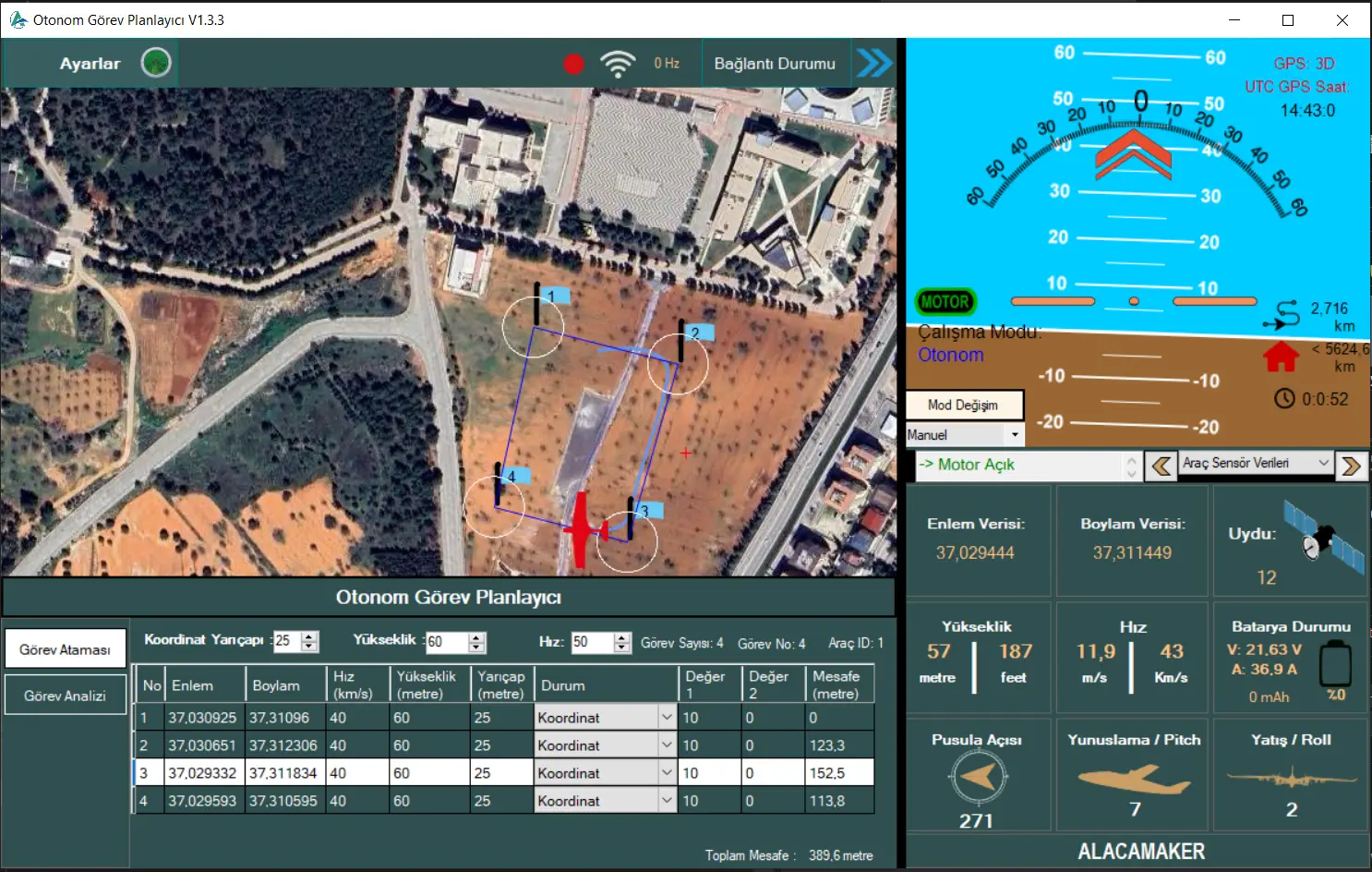

Ana Ekran

OGP Bağlantı
Gösterge Paneli
Veri Paneli
Otonom Görev Planlama
Harita
Ayarlar/Araç Tercihi
Ayarlar/Sanal Ufuk
Ayarlar/Kontrol Ayarları
Ayarlar/Çalışma Modları
Ayarlar/Servo
Ayarlar/Uzaktan Kontrol
Ayarlar/Pusula Ayarı
Ayarlar/Yükleme Ayarları
Ayarlar/Ek Ayarlar
Ayarlar/Sistem Ayarları
Ayarlar/Güvenlik Ayarları
